Hunting Bugs or Bug Hunting
By Michael Chungkun Chen
CS263c – Dyer
12/12/2002
Hypothesis:
I.
We can evolve hunting an
evading behavior based on pheromones with an artificial neural network.
II.
Animats can learn how to use
chemical signals in a new and exciting way.
III.
A more realistic environment
is a better environment to evolve these tasks in.
IV.
Speed is very important in
simulating a large amount of animats, so making the code efficient and using
integer and bit-wise operations will help in this project.
Motivation:
I.
I wanted to build
something that used a neural net because neural nets have always fascinated
me. From the time I first learned about
neurons from Psych 15 in my sophomore year, I just had to try and make a neuronal
model. My first attempt that year
failed because I did not realize all the aspects involved in using neural nets.
II.
I thought it would be
cool if I could create some animats that would work together, and maybe create
controllers for something more complex like nano-scaled robots. So this project is a good starting off
point.
III.
I wanted to try to
design a very fast and efficient neural net implementation. See I can get my computer to simulate enough
neurons maybe to accomplish some semi-complicated task.
IV.
I wanted to learn
techniques that maybe applied in other animat/neural net tasks, which would
make my code faster and more efficient.
V.
It would be fun to play
with these animats after I program them.
VI.
This would be a good
opportunity to learn how to program with the Windows API.
VII.
I also wanted to use
this programming opportunity to brush up on my class inheritance.
Architecture:
I.
Input and output of the
Neural Network
a. Sensors
i.
Health points (positive
number)
ii.
Energy Level (positive
number)
iii.
X and Y Positions (bounded
by constant screen width)
iv.
Current heading of the
bug (In degrees multiplied by 1000000)
v.
Smell vectors of three
smell regions around bug
1. Smell vectors contain a signal level for each smell
type
a. Food and corpses emit different levels of the same
smell
b. Each bug type has a different smell
c. Variable number of Signals allowed. Currently it is set to 6.
2. Totaling 10 smell signals for each region.
3. Initial trials had smell regions depend on heading of
bug, but changed to the three regions fixed at upper left, upper right, and
below bug. To prevent errors in
choosing regions.
vi.
Later experiments
involved a direction of friendly bug nearby
b. Motors
i.
Left turn amount (30
degree max)
ii.
Right turn amount (30
degree max)
iii.
Forward movement (0 to
4 spaces)
iv.
Backwards movement (0
to 1 spaces)
v.
Mating activation
(On/Off)
vi.
Eating activation
(On/Off)
vii.
Attacking activation
(On/Off)
viii.
Signal Emission
activation (Signal Strength)
II.
Environment and physics
of the world
a. World
i.
1024 X 768 pixels
ii.
Initial trials allowed
bugs to move past one edge to appear on the other side of the screen
iii.
Later trials forced
bugs to get stuck at the edge until they move away
iv.
Initially population
was based on the action of the bugs and energy available as food
v.
Due to population
explosion/collapse, population controls were introduced
vi.
During the middle phase
before using the Neighborhood list, population was capped at 500 for each bug
type
vii.
With the Neighborhood
list, it was much faster and population cap was increased to 1000 for each bug
type
b. Food
i.
Is stationary in the
world
ii.
Food have initial mass
which can be changed through menus,
iii.
When eaten, food mass
is decreased by that amount.
iv.
Food also decays and
starts with a user modifiable lifetime.
v.
When food decays or is
completely eaten, it is gone and deleted from the world.
vi.
When auto-feed feature
is on, amount of food is checked every cycle, and more food is added when quota
is not reached.
c. Smells
i.
Each food has the same
smell with a strong magnitude
ii.
Corpses have the same
smell but with a very weak magnitude
iii.
Each type of bug has
it’s own smell
iv.
Gender also has a
smell, only males generate this smell
v.
I started with one
signal for bugs to use, but increased signal number to 5
vi.
Smells are emitted at a
location and dissipates
vii.
When displayed, smells
are coded into colors and drawn in a miniature size maps
1. Green is for food
2. Blue is for bugs, any type of bugs
3. Red is for signals the bugs might emit
d. Bugs
i.
Types
1. Type 1 (Weak)
a. Less health
b. Less maturity time
c. Very little attack power
d. Energy cost to eat, mate, attack, and move is less
2. Type 2 (Balanced)
a. Reasonable health
b. Reasonable attack power
c. Maturity time is longer
d. Energy cost to eat, mate, attack and move is moderate
3. Type 3 (Strong)
a. Health is high
b. Attack power is high
c. Maturity time is longest
d. Energy cost to eat, mate, attack and move is highest
ii.
Moving
1. The bugs can either turn clockwise or
counterclockwise by 30 degrees
2. Then the bug can move forward by 0 to 4 steps or
backwards by 1 step
3. The bugs can not be on top of the same pixel as
another bug
4. In earlier trials once bugs reached the end of the
world, they would appear at the other side
5. In later trials once bugs reached the edges or
corners of the world they would get stuck there unless they turn around
iii.
Mating
1. Each bug may only mate with bugs of the same type and
opposite gender
2. They can only mate with bugs that are geographically
near
3. In the beginning when they activated mating, they
mated with every compatible candidate around
4. In later trials, they would only mate with one of the
candidates
5. Fitness was indirectly applied through the environment
in beginning trials, while in later ones a discrete fitness variable was added
6. Mating takes 1 cycle and off-springs are produced
immediately
7. Attempting to mate costs energy
iv.
Eating
1. The bugs can only eat what was nearby
2. In the beginning they would take a bite out of each
clump of food that was nearby
3. In later trails they can only take one bite out of
one clump of food
4. Either they ate a specific amount proportional to
their attack points, or they ate what is left of the food
5. They do not have to face their food
6. Eating takes only 1 cycle
7. Attempting to eat costs energy
v.
Attacking
1. Bugs can attack only bugs that are close by
2. They do not have to face the bug they are attacking
3. They can only attack one bug at a time
4. Attempting to attack costs energy
5. Attacked bugs gets to counterstrike bug is much
weaker than a full strength attack
vi.
Emitting smells
1. Any bug can emit any of the extra 5 smell signals in
the world.
2. Smells released are directly proportional to the
activation level of the resulting neuron
3. Original trials used only 5 signals, and smells
signals had a parallel distributed encoding.
4. Later trials each signal was extracted out of the
initial bug and food smells and given individual signals.
vii.
Dying
1. When a bug reaches 0 or less health it was killed
2. When a bug reaches 0 or less energy it starved to
death
3. When a bug’s time left reaches 0 it died of old age
4. It leaves a corpse which is converted to food
III.
Algorithms used
a. Smell Region Mapping
i.
Initial trials used a
link list of smells which was very inefficient and slow
ii.
Then I tried to store
smells at each pixel in a smell map of the world, but there were too many
pixels and it took more than a second to cycle just the smell itself on my
computer
iii.
Finally I decide to
regionalize the smell map, and divided the static world size of 1024 X 768 by
16, and arrived at 64 X 48 smell regions.
This made cycle times much faster
iv.
Smells are only
propagated to its adjacent cells, left, right, up and down.
v.
Initial world had
neighbor cells receive 1/8 the signal strength and the original cell receive ½
the strength. Smells were dissipating a
little too fast still
vi.
The current
implementation involves the neighbor cells receiving 1/16th of the
signal strength and the original cell to receive ¾ of the strength.
vii.
Equations used only had
simple shifting
1. Neighbor+=(Original>>4);
2. NewSignal=(Original>>1)+(Original>>2);
b. Neighborhood list
i.
Original trials did not
use the Neighborhood list and every bug had to check through the whole world to
determine which objects were nearby.
This gives us a whole factor of N more processing for every bug
ii.
A Neighborhood list was
added which would allow any thing to check an area for objects by checking the
region in a spatial manner, bypassing the need to check through the whole world
list
iii.
Each bug on movement
would delete itself from the neighbor list at it’s old position and add itself
to the neighbor list at the new position
iv.
When the Thing base
class is destructed, the object is removed from the neighbor list
v.
This feature allowed my
computer to process from 1500 bugs to an order of 100000 bugs within a few
seconds
c. Genetic Evolution
i.
Instead of discrete
generations, I decided to implement a more continuous propagation of genes.
1. Each bug has a lifetime
2. Each bug mates while alive and generates offspring
3. Bugs that can find mates and produce offspring are
more fit and will pass their genes off to their children
4. The more children they have, the better chance their
genes have for survival
ii.
Genes
1. The genes involved in the bugs are basically the
neuronal weights used.
2. When an offspring is created, the genes are directly
copied from both parents.
iii.
Mutation
1. Mutations occur during birth
2. It can happen anywhere in the gene with a rate of
MU_Rate which is set to 0.30 throughout the trials
3. An exponential distribution is used to generate a
number based on the mutation rate. And
we would skip this amount of non-mutated genes. Then we change the weight that mutated to a random number. And we continue until all weights are
passed.
iv.
Crossover
1. Crossovers occur during birth
2. It occurs at a rate of CR_Rate which is set to 0.30
throughout the trials
3. Again an exponential distribution is used, however
instead of skipping the weights all the time, we copy the weights from the
other parents every other time we encounter a crossover point
v.
Exponential Distribution
1. Equation for Exponential Distribution
a. result = - (1/MU_Rate) * log(random());
b. the random number is between 0 and 1
2. This is more efficient than generating a random
number for every weight, and checking that against the rate, to decide if we
have a mutation or crossover point.
d. Threshold functions
i.
None
1. I started out by not using a threshold function
because it was extra processing I didn’t want to give up
2. I used zero as my natural threshold
3. Negative number naturally result in a negative number
when multiplied to a positive one which would inhibit
4. Positive numbers would result in a positive number
when multiplied resulting in activation
5. When compared with the Sigmoid function, except for
adjusting values because the range is different, they both worked similarly
ii.
Sign Function
1. I tried the sign function because it was the least
processing of the three threshold functions in the CS161 book.
2. The results were very discrete, I had trouble
implementing turning because it required different levels of activation
3. All results were now either positive one, or negative
one.
4. This threshold function was insufficient
5. Equation
a. if (data[i]>=0) data[i]=BaseOne; else if
(data[i]<0) data[i]=-BaseOne;
iii.
Sigmoid function
1. I decided to try this function out because it was the
fanciest
2. Results were nice and smooth compared to the sign
function
3. Varying degrees of turns, movements, and signal
emission was allowed
4. Took a lot of processing to calculate the exponential
function slowed down by a factor of two
5. Equation
a. data[i]=(BaseOne/(1+exp(-(data[i]/BaseOne)))+0.5);
iv.
Approximated Sigmoid
function
1. I decided to combine the approximate shape of the
sigmoid function and maintain the speed of linear ones
2. The approximated sigmoid function has three segments
a. Zero segment
b. Linear rise
c. One segment
3. It worked better than the Sign function
4. It was faster than the sigmoid function
5. Equation
a. if (data[i]<-5000) data[i]=0;
else
if (data[i]>5000) data[i]=BaseOne;
else
data[i]=(data[i]+5000)*BaseOne/10000;
Experiments:
I.
Initial testing of the
physics of the environment
a. Initial testing involved getting the bugs to move and
making sure that they would genetically evolve.
b. Movement seemed jerky and in continual circles
i.
The angle of turn was
multiplied by too great of a factor
ii.
And jerky movement
caused by direct forward and backwards movement, no transformation through mass
and acceleration.
iii.
Reduced the angle of
turn factor, movement seemed more natural
c. Population either exploded or collapsed
i.
Too easy to reproduce,
or too hard to. Can’t get evolution
with population collapse, and population explosion caused system to slow down
to much to evolve in a reasonable time.
ii.
Attempts to tweak this
the physics of mating and reproduction failed.
1. Population equilibrium is a delicate balance that is
hard to achieve
2. Tried to manually adjust the amount of food available
a. Was not responsive enough, by the time food adjusted,
population had already exploded.
b. Residual energy from things eaten in the past
3. Decided to just cap population at set sizes
a. Worked well
b. A bit god like to be realistic
d. Smells either spread and stayed too long, or
dissipated before it was detected
i.
Smells would increase
to infinite and linger forever
ii.
Smells would reach 0
before it had a chance to spread at all
iii.
Introduced the idea of
Smell Conservation
1. Allowed smells to behave more realistic
II.
Trials to improve speed
of the simulation
a. System was only allowing a few hundred bugs to be
simulated
b. Tried to time execution time of each segment of code
c. Determined it was a algorithmic representation of
cycling through smells and determining nearby objects that slowed everything
down
d. Introduced smell regions to speed up cycle times
e. Introduced neighbor lists to further speed up cycle
times and to reduce the order of the program by a factor of the number of
objects in the world
III.
Trials to evolve
coordinated group activities
a. Tried to obtain coordinated defense and attack
b. Bugs were allowed to modify the five chemical signals
to communicate
c. No coordinated behavior other than herding evolved
i.
Herding evolved due to
mating being geographically bound, groups of bugs had a easier time mating than
bugs who wander off
ii.
Bugs not as easily
killed in groups did come into play but had a relatively small effect
iii.
Very likely that bugs
were just confused by the parallel smells because bugs only had 9 neurons in
the hidden layer at this stage
IV.
Trials after Separated
smells
a. Smells were separated into discrete signals for each
bug type, food, and gender along with possible chemical signals the bugs can
emit
b. Smells were a lot nicer to visualize
c. Easier to see when the bugs emit smells but still
hard to determine what the bugs were doing with smells
d. No still no more advance behavior than simple herding
behavior
V.
Making the world Flat
a. Bugs tended to move in the same direction all the
time to the lower right.
b. Removed wrapping so bugs get stuck at the corners to
determine if it was a visual effect or if bugs really moved in that direction
c. Many more bugs got stuck in the lower right corner,
and bugs in the upper left migrates towards the lower right
d. Determined that problem lay in calculating new
position, 0.5 was added before converting to an integer in order to round. This was gradually pushing all the bugs to
the lower right corner.
VI.
Trials after including
a heading of nearby friendly bug into sensors
a. When a bug detects Signal 6, it would include the
heading of a nearby friendly bug as part of its input to the neural net
b. Complicated attacking or defending behavior still
haven’t appeared
c. Interesting things such as bugs of the same type
meeting and changing directions occurred
i.
Almost appears as
though bugs were avoiding each other
VII.
Trials after including
a fitness selector into system
a. Fitness determined the probability of mating whenever
mating occurred before.
b. Probability from 0 to 1
c. All the bugs started dying off
d. Fitness was lost too fast had to adjust fitness
indicators
e. Ran out of time
Evaluation/Conclusions:
I.
I was not able to
evolve hunting or other higher coordinated behavior other than simple herding,
and reaction from nearby friendly type bugs with just pheromones.
a. Group activities such as hunting turns out to be
quite complicated and a simple pheromone signal is not enough to use to
coordinate with. Especially since the
signal is shared between all the bugs types.
b. Even being able to see the heading of a friendly bug is
not enough to coordinate hunting with.
II.
Maybe I was beginning
to see the animats evolving collision avoidance with pheromones, but I did not
have enough time to continue further in this venue
a. Animats would be heading towards each other and one
would start going in circles, or veer away.
b. Sometimes they would veer towards each other.
c. I believe this was just random or they were veering
towards other bugs that I wasn’t watching because I had no selectional pressure
for the bugs to avoid friendly types. I
did have very high selectional pressure for the bugs to mate, so I can
understand how veering towards each other would be beneficial.
III.
A more realistic
environment turned out to be worse to evolve animats in because it was just too
complicated and the focus becomes designing the environment than evolving
neural nets.
a. When comparing to the results that my roommate got,
his animats were all doing something interesting compared to mine, and he used
much fewer animats.
i.
He had two hundred
animats at most, while I at times had thousands. And the fewest I’ve had was like 500.
ii.
His model is a
generational one, with mating based on fitness only and was guaranteed. With elite ants passing into the next
generation.
iii.
My model was too
dependent on stabilizing population
iv.
Death was impossible in
his simulations so that allowed him to evolve using very few animats.
b. I could not tell what generation an animat was
because it’s hard to figure out what generation the child of a first generation
animat and a seventh generation animat would be.
c. Because animats could die, it was very possible that
animats that would have done really well would have died off before it had a
chance to mate.
i.
In fact, if an animat
that can hunt really well and can’t mate, nothing would come of it. Mating is so necessary and vital that
hunting probably isn’t even evolved at all.
IV.
Speed is very
important; once I was able to simulate animats at a more reasonable speed I was
able to observe more behaviors.
a. It does make a large difference if the world is
written efficiently even in this day and age when computers are very fast.
b. Once again comparing the speed of my simulations
versus my roommate’s
i.
My simulation was able
to run ten times more animats and still be a reasonable speed.
ii.
My simulation included
smells, mating, fighting, eating, and moving, and had a layer of 16 hidden
neurons in the end.
iii.
I believe my roommates
had only eating and moving and when he added smells he always claimed it slowed
down the system greatly.
c. I was able to do much more theoretical work after I
increased the speed of my simulations.
i.
Two thirds of the time
I was attempting to speed up the simulation and test the physics of the world
ii.
Though during that time
I was also trying to get coordinated hunting, the last Third of the time after
I got my simulations to be fast enough was I finally able to progress in any
sense with testing my main hypothesis
V.
All results are
analyzed through visual inspection statistical generation limited
Status:
I.
Windows Graphical
Interface
a. Done
II.
World where animats can
interact in
a. Done
III.
Smell World for
pheromone propagation
a. Done
IV.
Basic animats structure
and neural matrix
a. Done
V.
Attempting to get
animats to perform some kind of behavior
a. Mating - Done
b. Eating - Done
c. Attacking - Done
d. Using Chemical signal - Attempted but results
inconclusive
VI.
Attempting to get
animats to perform group coordinated behavior
a. Attempted but failed
VII.
Making simulation
efficient
a. Done
VIII.
Process separate worlds
on other computers and interfacing them through the network
a. Not attempted but dreamed of
IX.
Statistical Generation
a. Limited to population and count of food
X.
Logfiles
a. Done
Appendix:
References:
theForger’s Win32 API Tutorial
http://www.winprog.org/tutorial/
Michael Chiu’s project used in comparison studies
Sample Log File:
Moved 1 distance to 330.773000
We see the other bug of type 65 and we are type 65
Moved 3 distance to -19.716000
Moved 5 distance to 322.120000
Moved 3 distance to 507.927000
Moved -2 distance to -6.79000
We see the other bug of type 66 and we are type 65
Fitness for mating 4946
Type: 65 - Mates with Type:66
Moved 5 distance to 459.552000
Moved -2 distance to -23.705000
Moved -2 distance to 222.516000
Type: 65 - Eats
Moved 5 distance to -67.31000
Type: 65 - Eats
Moved 5 distance to -19.343000
Moved 3 distance to 28.950000
Moved 3 distance to 323.0
Moved 3 distance to 177.0
Moved 3 distance to 434.0
Moved -2 distance to 23.21000
Moved 5 distance to 177.387000
Moved 3 distance to -5.31000
Moved 3 distance to 319.678000
Moved -2 distance to 129.714000
Moved -2 distance to 210.0
Moved 5 distance to 597.0
Moved 3 distance to 352.613000
Moved 5 distance to 295.447000
Moved 5 distance to -33.371000
Moved -2 distance to 141.502000
Moved 5 distance to 145.192000
Moved -2 distance to 237.788000
Moved 3 distance to 340.0
We see the other bug of type 65 and we are type 66
Moved 5 distance to -144.179000
Moved 3 distance to 225.0
We see the other bug of type 65 and we are type 65
Moved 3 distance to 1.373000
Moved 3 distance to 478.0
Moved 0 distance to 240.861000
Moved 5 distance to 5.0
Moved 3 distance to 182.919000
Moved 3 distance to 39.646000
We see the other bug of type 65 and we are type 65
Moved 5 distance to 95.162000
Moved 3 distance to 367.0
Moved 3 distance to 426.275000
Moved 2 distance to 155.812000
Moved 5 distance to 146.0
Moved 3 distance to 336.0
Moved 0 distance to 15.0
Moved 3 distance to -12.0
Moved 3 distance to 137.287000
Moved 5 distance to 209.136000
Moved 3 distance to 211.0
Moved 3 distance to 148.0
Moved -2 distance to 296.642000
Moved 3 distance to 43.229000
Moved 4 distance to 310.63000
Moved 2 distance to 292.0
Moved -2 distance to 198.0
Moved 4 distance to 241.354000
We see the other bug of type 66 and we are type 66
Moved 5 distance to 293.29000
Moved 5 distance to 94.704000
Moved 5 distance to 26.712000
Moved 3 distance to -123.0
Type: 66 - Eats
Moved 5 distance to 336.0
Moved -2 distance to 4.0
Moved 3 distance to 141.0
Moved 0 distance to 47.119000
Moved -2 distance to 197.16000
Moved 3 distance to -20.612000
Moved 0 distance to 60.613000
Moved 5 distance to 192.0
Moved 3 distance to 423.0
Moved 3 distance to 316.530000
Moved 0 distance to 170.0
Moved 4 distance to 178.149000
Moved 3 distance to 395.31000
Type: 34 - Eats
Moved 0 distance to 276.493000
Moved 3 distance to -134.0
Moved 3 distance to 309.294000
We see the other bug of type 34 and we are type 34
Moved 3 distance to 255.0
Moved 3 distance to 451.928000
Moved 3 distance to 341.721000
Moved 5 distance to 401.732000
Moved 3 distance to 33.981000
Moved 5 distance to 358.511000
Moved 0 distance to 223.124000
Moved 0 distance to 517.0
We see the other bug of type 34 and we are type 33
Fitness for mating 4967
Type: 33 - Mates with Type:34
Moved 0 distance to 177.556000
Moved 3 distance to 23.720000
Moved 3 distance to 207.0
Moved -2 distance to 109.893000
Moved 5 distance to 431.805000
We see the other bug of type 34 and we are type 34
Moved 3 distance to 296.0
Moved 3 distance to 230.111000
We see the other bug of type 33 and we are type 33
Moved 3 distance to -234.0
We see the other bug of type 34 and we are type 34
Moved 5 distance to 425.0
Moved 0 distance to 202.858000
This data was
basically used to determine what actions were performed and how the bugs were
moving, and certain messages were included and taken out depending on the goal
of the experiment, all trials tended to generate >10MB files, I will not
include all of them.
Screen Shots:
Very early screen shot of initial setup and tests. Group 1 bugs are seen clumping together in huge amounts. This was near the initial testing and setup of the world.
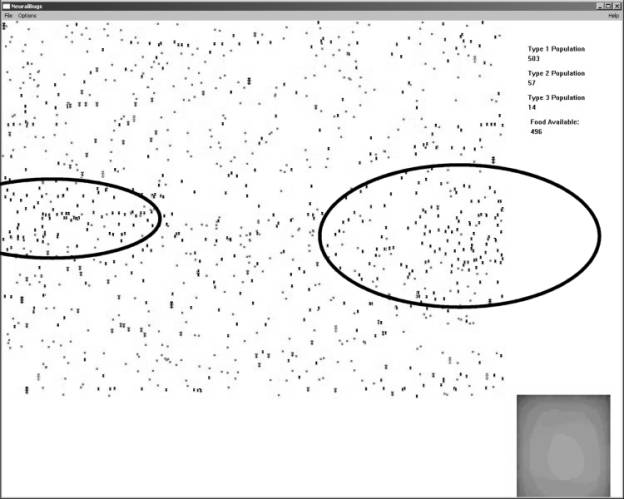
The circled portions are type 1 bugs, which have learned to reproduce easily by clumping together. Notice how type 1 bugs has a populations of 503 while type 2 bugs have 57, and type 3 bugs only have 14. This run was done early in the experiment when the population was capped at 500. Before I perfected the smells and before I initiated the neighborhood map.
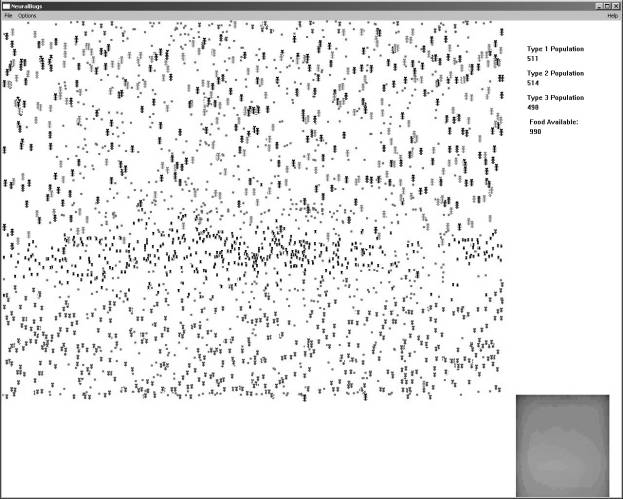
Type 3 bugs are clumping together at the type, then type one bugs in the middle, and type 2 bugs on the bottom. It’s interesting because the starting points of the bugs were, type 2-upper left, type 1-upper right, type 3-lower right. This was also run before the smell map was perfected and the population cap was still 500.
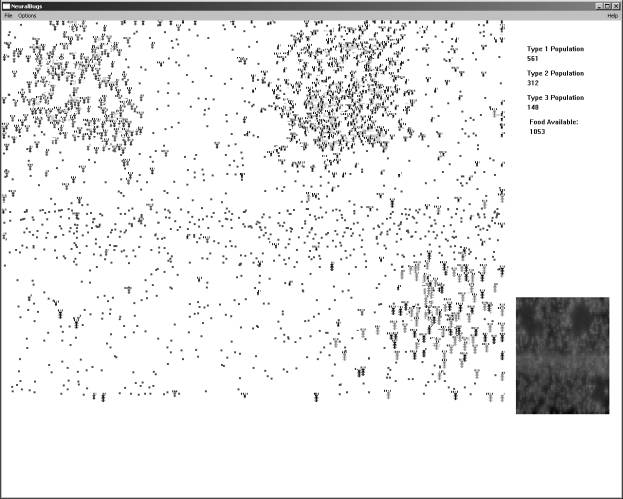
Latest screenshots, there are indicators above each bugs’s head to show which activators are working. The smell world was tweaked some more giving a nice puffy type look. Picture looks much better in color.
/*Mainwin.cpp*/
#define STRICT
#define GUIMode
#include "memleak.h"
#include <stdlib.h>
#include <fstream.h>
#include <windows.h>
#include <time.h>
#include <string>
#include "constants.h"
#include "Neighbor.h"
class Things *World=NULL;
class Things *Deadlist=NULL;
class Smells *smellmap=NULL;
struct Neighbor *nearlist=NULL;
//Setup the default values for numbers that can be
modified during runtime.
int tvalue=50; //Delay
between each cycle in milliseconds
int num3Bugs=100; //Number
of type 3 bugs to add
int num2Bugs=200; //Number
of type 2 bugs to add
int num1Bugs=400; //Number
of type 1 bugs to add
int numFood=700; //Number
of food to add
int worldtime=0; //World
starts at time 0
int totalEnergy=0; //Energy
of world is 0
int num1Left=0; //Counting
variable for type 1 bug
int num2Left=0; //Counting
variable for type 2 bug
int num3Left=0; //Counting
variable for type 3 bug
int foodLeft=0; //Counting
variable for food
int DecayTime=500; //Duration
food lasts
int DefaultMass=10000; //How much energy each piece of food gives
bool autoFeed=true; //Autofeed
mode is on
bool randomFood=true; //Randomize food location is on
bool DRAWON=true; //Drawing
bugs is on
bool ShowSig=true; //Show
the bugs activator signals is on
int foodLev=500; //The
number of food to maintain in auto feed mode
int foodXpos=maxX>>1; //XPosition of food is center of screen
int foodYpos=maxY>>1; //YPosition of food is center of screen
int foodRadius=maxX>>1; //Radius of food zone is half the largest dimension
int foodDiam=maxX; //Diameter
of food zone is largest dimension
int group1x=700; //X
and Y pos of the Center of
int group1y=150; //Type
1 Bug group
int group2x=150; //X
and Y pos of the Center of
int group2y=150; //Type
2 Bug group
int group3x=900; //X
and Y pos of the Center of
int group3y=600; //Type
3 Bug group
//Files for output
ofstream logfile; //Logfile
of activities and statistics
ofstream timefile; //Time
file to determine bottle necks
int PrgExit=0; //Exit
variable false
unsigned int globtime=0;//Global time is 0
#include "resource.h"
//#include "NeuralNet.h"
#include "Smells.h"
#include "World.h"
#include "Thing.h"
#include "Bugs.h"
#include "Food.h"
#include "Obstacle.h"
using namespace std;
// My procedures
//Windows GUI stuff will not be commented.
// Options Dialog box procedure
BOOL CALLBACK DProc
(HWND
hwnd, UINT message, WPARAM wParam, LPARAM lParam) {
HWND
ShowSignal = GetDlgItem(hwnd, IDC_ShowSignal);
HWND
DrawBug = GetDlgItem(hwnd, IDC_DrawBug);
HWND
AutoFeed = GetDlgItem(hwnd, IDC_AutoFeed);
HWND
RandomFood = GetDlgItem(hwnd, IDC_RandomFood);
HWND
FoodLev = GetDlgItem(hwnd, IDC_FoodLev);
HWND
FoodGenXpos = GetDlgItem(hwnd, IDC_FoodGenXpos);
HWND
FoodGenYpos = GetDlgItem(hwnd, IDC_FoodGenYpos);
HWND
FoodRadius = GetDlgItem(hwnd, IDC_FoodRadius);
HWND
FoodMass = GetDlgItem(hwnd, IDC_FoodMass);
HWND
FoodDur = GetDlgItem(hwnd, IDC_FoodDur);
HWND G1X
= GetDlgItem(hwnd, IDC_G1X);
HWND G1Y
= GetDlgItem(hwnd, IDC_G1Y);
HWND G2X
= GetDlgItem(hwnd, IDC_G2X);
HWND G2Y
= GetDlgItem(hwnd, IDC_G2Y);
HWND G3X
= GetDlgItem(hwnd, IDC_G3X);
HWND G3Y
= GetDlgItem(hwnd, IDC_G3Y);
char
a[50];
int Length = 0;
switch(message)
{
case
WM_INITDIALOG :
itoa(group1x,a,10);
SetWindowText(G1X,
TEXT(a));
itoa(group1y,a,10);
SetWindowText(G1Y,
TEXT(a));
itoa(group2x,a,10);
SetWindowText(G2X,
TEXT(a));
itoa(group2y,a,10);
SetWindowText(G2Y,
TEXT(a));
itoa(group3x,a,10);
SetWindowText(G3X,
TEXT(a));
itoa(group3y,a,10);
SetWindowText(G3Y,
TEXT(a));
itoa(foodLev,a,10);
SetWindowText(FoodLev,
TEXT(a));
itoa(foodXpos,a,10);
SetWindowText(FoodGenXpos,
TEXT(a));
itoa(foodYpos,a,10);
SetWindowText(FoodGenYpos,
TEXT(a));
itoa(foodRadius,a,10);
SetWindowText(FoodRadius,
TEXT(a));
itoa(DefaultMass,a,10);
SetWindowText(FoodMass,
TEXT(a));
itoa(DecayTime,a,10);
SetWindowText(FoodDur,
TEXT(a));
if
(autoFeed) {
SendMessage(AutoFeed,BM_SETCHECK,BST_CHECKED,0);
}
else
{
SendMessage(AutoFeed,BM_SETCHECK,BST_UNCHECKED,0);
}
if
(DRAWON) {
SendMessage(DrawBug,BM_SETCHECK,BST_CHECKED,0);
}
else
{
SendMessage(DrawBug,BM_SETCHECK,BST_UNCHECKED,0);
}
if
(ShowSig) {
SendMessage(ShowSignal,BM_SETCHECK,BST_CHECKED,0);
}
else
{
SendMessage(ShowSignal,BM_SETCHECK,BST_UNCHECKED,0);
}
if
(randomFood) {
SendMessage(RandomFood,
BM_SETCHECK,BST_CHECKED,0);
}
else
{
SendMessage(RandomFood,
BM_SETCHECK,BST_UNCHECKED,0);
}
return
TRUE ;
case
WM_COMMAND :
switch
(LOWORD (wParam))
{
case
IDOK :
Length
= GetWindowTextLength(G1X);
GetWindowText(G1X,
a, Length+1);
group1x
= (int)atoi(a);
Length
= GetWindowTextLength(G1Y);
GetWindowText(G1Y,
a, Length+1);
group1y
= (int)atoi(a);
Length
= GetWindowTextLength(G2X);
GetWindowText(G2X,
a, Length+1);
group2x
= (int)atoi(a);
Length
= GetWindowTextLength(G2Y);
GetWindowText(G2Y,
a, Length+1);
group2y
= (int)atoi(a);
Length
= GetWindowTextLength(G3X);
GetWindowText(G3X,
a, Length+1);
group3x
= (int)atoi(a);
Length
= GetWindowTextLength(G3Y);
GetWindowText(G3Y,
a, Length+1);
group3y
= (int)atoi(a);
Length
= GetWindowTextLength(FoodLev);
GetWindowText(FoodLev,
a, Length+1);
foodLev
= (int)atoi(a);
Length
= GetWindowTextLength(FoodGenXpos);
GetWindowText(FoodGenXpos,
a, Length+1);
foodXpos
= (int)atoi(a);
Length
= GetWindowTextLength(FoodGenYpos);
GetWindowText(FoodGenYpos,
a, Length+1);
foodYpos
= (int)atoi(a);
Length
= GetWindowTextLength(FoodRadius);
GetWindowText(FoodRadius,
a, Length+1);
foodRadius
= (int)atoi(a);
foodDiam=foodRadius<<1;
Length
= GetWindowTextLength(FoodMass);
GetWindowText(FoodMass,
a, Length+1);
DefaultMass
= (int)atoi(a);
Length
= GetWindowTextLength(FoodDur);
GetWindowText(FoodDur,
a, Length+1);
DecayTime
= (int)atoi(a);
if
(SendMessage(AutoFeed,BM_GETCHECK,0,0)==BST_CHECKED) {
autoFeed=true;
}
else
{
autoFeed=false;
}
if
(SendMessage(ShowSignal,BM_GETCHECK,0,0)==BST_CHECKED) {
ShowSig=true;
}
else
{
ShowSig=false;
}
if
(SendMessage(DrawBug,BM_GETCHECK,0,0)==BST_CHECKED) {
DRAWON=true;
}
else
{
DRAWON=false;
}
if
(SendMessage(RandomFood,BM_GETCHECK,0,0)==BST_CHECKED) {
randomFood=true;
}
else
{
randomFood=false;
}
EndDialog
(hwnd, 0) ;
return
TRUE ;
case
IDCANCEL :
EndDialog
(hwnd, 1) ;
return
TRUE ;
}
break
;
}
return
FALSE ;
}
BOOL CALLBACK D2Proc
(HWND
hwnd, UINT message, WPARAM wParam, LPARAM lParam) {
char
a[50];
HWND
speedset = GetDlgItem(hwnd, IDC_EDIT2);
int Length = 0;
int grabbed_data;
switch(message)
{
case
WM_INITDIALOG :
itoa(tvalue,a,10);
SetWindowText(speedset,
TEXT(a));
return
TRUE ;
case
WM_COMMAND :
switch
(LOWORD (wParam))
{
case
IDOK :
Length
= GetWindowTextLength(speedset);
GetWindowText(speedset,
a, Length+1);
grabbed_data
= (int)atoi(a);
EndDialog
(hwnd, grabbed_data) ;
return
TRUE ;
case
IDCANCEL :
EndDialog
(hwnd, tvalue) ;
return
TRUE ;
}
break
;
}
return
FALSE ;
}
BOOL CALLBACK D3Proc
(HWND
hwnd, UINT message, WPARAM wParam, LPARAM lParam) {
char
a[50];
HWND
Bug1Num = GetDlgItem(hwnd, IDC_Bug1);
HWND
Bug2Num = GetDlgItem(hwnd, IDC_Bug2);
HWND
Bug3Num = GetDlgItem(hwnd, IDC_Bug3);
HWND
FoodNum = GetDlgItem(hwnd, IDC_Food);
int Length = 0;
int grabbed_data;
switch(message)
{
case
WM_INITDIALOG :
itoa(num1Bugs,a,10);
SetWindowText(Bug1Num,
TEXT(a));
itoa(num2Bugs,a,10);
SetWindowText(Bug2Num,
TEXT(a));
itoa(num3Bugs,a,10);
SetWindowText(Bug3Num,
TEXT(a));
itoa(numFood,a,10);
SetWindowText(FoodNum,
TEXT(a));
return
TRUE ;
case
WM_COMMAND :
switch
(LOWORD (wParam))
{
case
IDAdd :
Length
= GetWindowTextLength(Bug1Num);
GetWindowText(Bug1Num,
a, Length+1);
grabbed_data
= (int)atoi(a);
num1Bugs=grabbed_data;
Length
= GetWindowTextLength(Bug2Num);
GetWindowText(Bug2Num,
a, Length+1);
grabbed_data
= (int)atoi(a);
num2Bugs=grabbed_data;
Length
= GetWindowTextLength(Bug3Num);
GetWindowText(Bug3Num,
a, Length+1);
grabbed_data
= (int)atoi(a);
num3Bugs=grabbed_data;
Length
= GetWindowTextLength(FoodNum);
GetWindowText(FoodNum,
a, Length+1);
grabbed_data
= (int)atoi(a);
numFood=grabbed_data;
EndDialog
(hwnd, 1) ;
return
TRUE;
case
IDSave :
Length = GetWindowTextLength(Bug1Num);
GetWindowText(Bug1Num,
a, Length+1);
grabbed_data
= (int)atoi(a);
num1Bugs=grabbed_data;
Length
= GetWindowTextLength(Bug2Num);
GetWindowText(Bug2Num,
a, Length+1);
grabbed_data
= (int)atoi(a);
num2Bugs=grabbed_data;
Length
= GetWindowTextLength(Bug3Num);
GetWindowText(Bug3Num,
a, Length+1);
grabbed_data
= (int)atoi(a);
num3Bugs=grabbed_data;
Length
= GetWindowTextLength(FoodNum);
GetWindowText(FoodNum,
a, Length+1);
grabbed_data
= (int)atoi(a);
numFood=grabbed_data;
EndDialog
(hwnd, 0) ;
return
TRUE ;
}
break
;
}
return
FALSE ;
}
// Window Procedure called by Windows
LRESULT CALLBACK WindowProcedure
(HWND
hwnd, unsigned int message, WPARAM wParam, LPARAM lParam)
{
static
HINSTANCE hInstance;
static
HBITMAP h_bug1F = NULL;
static
HBITMAP h_bug1M = NULL;
static
HBITMAP h_bug2F = NULL;
static
HBITMAP h_bug2M = NULL;
static
HBITMAP h_bug3F = NULL;
static
HBITMAP h_bug3M = NULL;
static
HBITMAP h_food = NULL;
RECT
a={0,0,maxX,maxY};
OPENFILENAME
lpofn;
PAINTSTRUCT
ps;
HBITMAP
bmp;
HDC
hdcBug1M,hdcBug1F, hdcBug2M, hdcBug2F, hdcBug3M, hdcBug3F, hdcFood;
HDC hdc;
int ret;
char
maskstring[]="Bug World Type Files (*.BUG)\0*.BUG\0All Files (*.*)\0*.*\0";
char
filename[500]="";
ZeroMemory(&lpofn,
sizeof(lpofn));
filename[0]=0;
lpofn.lStructSize=sizeof(OPENFILENAME);
lpofn.hwndOwner=hwnd;
lpofn.lpstrFilter=maskstring;
lpofn.lpstrCustomFilter=NULL;
lpofn.lpstrFile=filename;
lpofn.nMaxFile=500;
lpofn.Flags=OFN_ENABLESIZING|OFN_OVERWRITEPROMPT|OFN_EXPLORER;
lpofn.lpstrInitialDir=".\\";
lpofn.lpstrDefExt
= "BUG";
switch
(message)
{
case
WM_CREATE:
srand((unsigned)time(
NULL ));
smellmap=new
Smells[(maxx+1)*(maxy+1)];
ret
= SetTimer(hwnd, ID_TIMER, tvalue, NULL);
if(ret
== 0)
MessageBox(hwnd,
"Could not SetTimer()!", "Error", MB_OK |
MB_ICONEXCLAMATION);
h_bug1M = LoadBitmap(GetModuleHandle(NULL), MAKEINTRESOURCE(IDB_Bug1M));
if(h_bug1M == NULL)
MessageBox(hwnd,
"Could not load BUG!", "Error", MB_OK |
MB_ICONEXCLAMATION);
h_bug1F = LoadBitmap(GetModuleHandle(NULL), MAKEINTRESOURCE(IDB_Bug1F));
if(h_bug1F == NULL)
MessageBox(hwnd, "Could not load BUG!", "Error",
MB_OK | MB_ICONEXCLAMATION);
h_bug2M = LoadBitmap(GetModuleHandle(NULL), MAKEINTRESOURCE(IDB_Bug2M));
if(h_bug2M == NULL)
MessageBox(hwnd, "Could not load BUG!", "Error",
MB_OK | MB_ICONEXCLAMATION);
h_bug2F = LoadBitmap(GetModuleHandle(NULL), MAKEINTRESOURCE(IDB_Bug2F));
if(h_bug2F == NULL)
MessageBox(hwnd, "Could not load BUG!", "Error",
MB_OK | MB_ICONEXCLAMATION);
h_bug3M = LoadBitmap(GetModuleHandle(NULL), MAKEINTRESOURCE(IDB_Bug3M));
if(h_bug3M
== NULL)
MessageBox(hwnd, "Could not load BUG!", "Error",
MB_OK | MB_ICONEXCLAMATION);
h_bug3F = LoadBitmap(GetModuleHandle(NULL), MAKEINTRESOURCE(IDB_Bug3F));
if(h_bug3F == NULL)
MessageBox(hwnd, "Could not load BUG!", "Error",
MB_OK | MB_ICONEXCLAMATION);
h_food = LoadBitmap(GetModuleHandle(NULL), MAKEINTRESOURCE(IDB_FOOD));
if(h_food == NULL)
MessageBox(hwnd, "Could not load Food!", "Error",
MB_OK | MB_ICONEXCLAMATION);
hInstance
= ((LPCREATESTRUCT) lParam)->hInstance;
hdc =
BeginPaint(hwnd, &ps);
FillRect(hdc,
&a, (HBRUSH)GetStockObject(WHITE_BRUSH));
a.left=maxX+50;
a.right=maxX+200;
a.top=50;
a.bottom=maxY;
FillRect(hdc,
&a, (HBRUSH)GetStockObject(WHITE_BRUSH));
EndPaint(hwnd, &ps);
break;
case
WM_DESTROY:
DeleteObject(h_bug1M);
DeleteObject(h_bug1F);
DeleteObject(h_bug2M);
DeleteObject(h_bug2F);
DeleteObject(h_bug3M);
DeleteObject(h_bug3F);
DeleteObject(h_food);
KillTimer(hwnd,
ID_TIMER);
DoMyExit();
PostQuitMessage (0);
return 0;
//case
WM_NCPAINT:
//Clears
the memory screen
//FillRect(hdc,
&a, (HBRUSH)GetStockObject(WHITE_BRUSH));
//break;
case
WM_TIMER:
CycleSmell();
Cycle();
InvalidateRect(hwnd,NULL,FALSE);
break;
case
WM_PAINT:
BITMAP s_bug1M, s_bug1F, s_bug2M, s_bug2F, s_bug3M, s_bug3F, s_Food;
hdc =
BeginPaint(hwnd, &ps);
ShowStats(hdc);
ShowSmellMap(hdc);
if
(DRAWON) {
hdcBug1M
= CreateCompatibleDC(hdc);
bmp
= (HBITMAP)SelectObject(hdcBug1M,h_bug1M);
GetObject(h_bug1M,
sizeof(s_bug1M), &s_bug1M);
hdcBug1F
= CreateCompatibleDC(hdc);
bmp
= (HBITMAP)SelectObject(hdcBug1F,h_bug1F);
GetObject(h_bug1F,
sizeof(s_bug1F), &s_bug1F);
hdcBug2M
= CreateCompatibleDC(hdc);
bmp
= (HBITMAP)SelectObject(hdcBug2M,h_bug2M);
GetObject(h_bug2M,
sizeof(s_bug2M), &s_bug2M);
hdcBug2F
= CreateCompatibleDC(hdc);
bmp
= (HBITMAP)SelectObject(hdcBug2F,h_bug2F);
GetObject(h_bug2F,
sizeof(s_bug2F), &s_bug2F);
hdcBug3M
= CreateCompatibleDC(hdc);
bmp
= (HBITMAP)SelectObject(hdcBug3M,h_bug3M);
GetObject(h_bug3M,
sizeof(s_bug3M), &s_bug3M);
hdcBug3F
= CreateCompatibleDC(hdc);
bmp
= (HBITMAP)SelectObject(hdcBug3F,h_bug3F);
GetObject(h_bug3F,
sizeof(s_bug3F), &s_bug3F);
hdcFood
= CreateCompatibleDC(hdc);
bmp
= (HBITMAP)SelectObject(hdcFood,h_food);
GetObject(h_food,
sizeof(s_Food), &s_Food);
//Cycles
through objects and draws objects on screen
Draw(hdc,
s_bug1M, s_bug1F, s_bug2M, s_bug2F, s_bug3M, s_bug3F, s_Food,
hdcBug1M,
hdcBug1F, hdcBug2M, hdcBug2F, hdcBug3M, hdcBug3F, hdcFood);
//*/
DeleteDC(hdcFood);
DeleteDC(hdcBug1F);
DeleteDC(hdcBug1M);
DeleteDC(hdcBug2F);
DeleteDC(hdcBug2M);
DeleteDC(hdcBug3F);
DeleteDC(hdcBug3M);
}
EndPaint(hwnd, &ps);
//DrawScreen(hwnd);
break;
case
WM_COMMAND: //Menu handler labels
switch(LOWORD(wParam))
{
case
IDCLOSE:
DoMyExit();
PostQuitMessage
(0);
return
0;
case
IDHELP:
return
0;
case
IDStart:
Begin(hwnd);
return
0;
case
ID_Save:
lpofn.lpstrTitle="Save
Bugs";
ret=GetSaveFileName(&lpofn);
if
(ret) SaveWorld(filename);
return
0;
case
ID_Load:
lpofn.lpstrTitle="Load
Bugs";
ret=GetOpenFileName(&lpofn);
if
(ret) LoadWorld(filename);
return
0;
case
IDSettings:
ret=DialogBox(GetModuleHandle(NULL),
MAKEINTRESOURCE(IDD_DIALOG1), hwnd, DProc);
if
(ret==0) {
}
else if (ret==1) {
}
return
0;
case
IDAdd:
ret=DialogBox(GetModuleHandle(NULL),
MAKEINTRESOURCE(IDD_DIALOG3), hwnd, D3Proc);
if
(ret==0) {
}
else if (ret==1) {
Begin(hwnd);
}
return
0;
case
IDSpeed:
tvalue=DialogBox(GetModuleHandle(NULL),
MAKEINTRESOURCE(IDD_DIALOG2), hwnd, D2Proc);
KillTimer(hwnd,
ID_TIMER);
ret
= SetTimer(hwnd, ID_TIMER, tvalue, NULL);
if(ret
== 0)
MessageBox(hwnd,
"Could not SetTimer()!", "Error", MB_OK | MB_ICONEXCLAMATION);
return
0;
case
IDClear:
ClearWorld();
hdc =
BeginPaint(hwnd, &ps);
FillRect(hdc,
&a, (HBRUSH)GetStockObject(WHITE_BRUSH));
EndPaint(hwnd, &ps);
InvalidateRect(hwnd,&a,TRUE);
return
0;
}
return
0;
}
return
DefWindowProc (hwnd, message, wParam, lParam );
}
int WINAPI WinMain (HINSTANCE hinst, HINSTANCE
previnst, LPSTR cmd, int ncmd)
{
HWND
mwnd;
MSG msg;
WNDCLASS
wndclass;
int pix;
//Initialize
the log files
logfile.open("log.dat");
timefile.open("time.txt");
//Create
and clear the Neighborhood list.
pix=(maxX+1)*(maxY+1);
nearlist=new
struct Neighbor[pix];
memset(nearlist,0,sizeof(struct Neighbor)*pix);
wndclass.style = 0;
wndclass.lpfnWndProc = WindowProcedure; // window procedure: mandatory
wndclass.cbClsExtra = 0;
wndclass.cbWndExtra = 0;
wndclass.hInstance = hinst;
// owner of the class: mandatory
wndclass.hIcon = 0;
wndclass.hCursor = ::LoadCursor (0, IDC_ARROW); // optional
wndclass.hbrBackground = (HBRUSH) (COLOR_WINDOW + 1); // optional
wndclass.lpszMenuName = MAKEINTRESOURCE(IDR_MENU1); //Setup the menu
system, 0 if none
wndclass.lpszClassName = "MainWndClass"; // mandatory
RegisterClass(&wndclass);
mwnd=CreateWindow("MainWndClass","NeuralBugs",WS_OVERLAPPEDWINDOW,
0,0,maxX+256,maxY+256,
(HWND)
NULL, (HMENU) NULL, hinst, (LPVOID) NULL);
ShowWindow(mwnd,ncmd);
UpdateWindow(mwnd);
while
(GetMessage(&msg, (HWND) NULL, 0, 0))
{
TranslateMessage(&msg);
DispatchMessage(&msg);
}
return
0;
}
/********************************************************************************************
Constant declaration, and global variable
declarations
********************************************************************************************/
#ifndef constants_h
#define constants_h
#include <stdio.h>
#include <fstream.h>
const int ID_TIMER = 1;
extern int tvalue; //Time
between each cycle in milliseconds
extern int worldtime; //Age in cycles of the world
extern int num3Bugs; //Number
of type 3 bugs to initialize
extern int num2Bugs; //Number
of type 2 bugs to initialize
extern int num1Bugs; //Number
of type 1 bugs to initialize
extern int numFood; //Number
of food to initialize
extern int totalEnergy; //Total energy in the world (yet unused)
extern int num1Left; //Number
of type 1 bugs currently
extern int num2Left; //Number
of type 2 bugs currently
extern int num3Left; //Number
of type 3 bugs currently
extern int foodLeft; //Number
of food left in world
extern bool ShowSig; //Show
signal flag (draws the bugs activators on screen above bugs)
extern bool DRAWON; //Drawon
flag (Turns on and off drawing of bugs)
extern bool autoFeed; //Autofeed flag (Enables the program to
automatically feed bugs)
extern bool randomFood; //Random food flag (Randomly places food in a range round
food center)
extern int foodLev; //Level
to keep food above for autofeed
extern int foodXpos; //X
position of the food center
extern int foodYpos; //Y
position of the food center
extern int foodRadius; //Radius of the food region
extern int foodDiam; //Diameter
of the food region
extern int DefaultMass; //Mass of new food
extern int DecayTime; //Decay time of new food
extern int group1x; //X
and Y pos of the Center of
extern int group1y; //Type
1 Bug group
extern int group2x; //X
and Y pos of the Center of
extern int group2y; //Type
2 Bug group
extern int group3x; //X
and Y pos of the Center of
extern int group3y; //Type
3 Bug group
//Screen size boundaries
const int maxX=1024;
const int maxY=768;
const int maxy=48;
const int maxx=64;
const int maxall=maxy*maxx;
//Smell constants
const int SmellMAX=0x00ffffff; //Smell signal
strength cap
const int SigNum=10; //Number
of signals for smells
const int EnergyLoss=200; //Energy loss when becomming corpse
const int B1LifeTime=400; //Lifetime of bug
const int B1TimeLeft=380; //Time left in world before you can have offspring
const int B1InfantEnergy=6000;//Energy at birth
const int B1EnergyNeed=3000; //Energy Needed to have offspring.
const int B1CorpseMass=300; //Energy left in corpse
const int B1HP=14; //Hit
points
const int B1AP=2; //Action/Attack
points
const int B2LifeTime=600; //Lifetime of bug
const int B2TimeLeft=540; //Time left in world before you can have offspring
const int B2InfantEnergy=8000;//Energy at birth
const int B2EnergyNeed=4000; //Energy Needed to have offspring.
const int B2CorpseMass=500; //Energy left in corpse
const int B2HP=35; //Hit
points
const int B2AP=5; //Action/Attack
points
const int B3LifeTime=500; //Lifetime of bug
const int B3TimeLeft=420; //Time left in world before you can have
offspring
const int B3InfantEnergy=10000; //Energy at birth
const int B3EnergyNeed=5000; //Energy Needed to have offspring.
const int B3CorpseMass=3500; //Energy left in corpse
const int B3HP=41; //Hit
points
const int B3AP=10; //Action/Attack
points
//Unused constants or constants used for generic
objects not used
const int newenergy=10000;
const int Lifespan=500;
const int initialMass=5000; //Not used
//Mutation rate of 30%
#define MU_Rate 0.30
//Cross over rate of 30%
#define CR_Rate 0.30
/*************************
ID TAGS
*************************/
#define ID_Obstacle 0x08
#define ID_Food 0x04
#define ID_Bug1M 0x11
#define ID_Bug1F 0x12
#define ID_Bug2M 0x21
#define ID_Bug2F 0x22
#define ID_Bug3M 0x41
#define ID_Bug3F 0x42
#define ID_Bug1 0x10
#define ID_Bug2 0x20
#define ID_Bug3 0x40
#define ID_Bug 0x73
/******************************
Smell Gradient Conversion
******************************/
const int SCTnum = 20; //Number of signal levels
//Smell bounds
const int SmellConvBound[]= {0x000004,0x000008,0x000010,0x000020,
0x000040,0x000080,0x000100,0x000200,
0x000400,0x000800,0x001000,0x002000,
0x004000,0x008000,0x010000,0x020000,
0x040000,0x080000,0x100000,0x200000};
//Color levels
const int SmellConvVal[]= {0x002,0x004,0x008,0x00C,
0x00F,0x01F,0x02F,0x03F,
0x04F,0x05F,0x06F,0x07F,
0x08F,0x09F,0x0AF,0x0BF,
0x0CF,0x0DF,0x0EF,0x0FF};
/***************************************************
Smells
***************************************************/
//Originally parrallel distributed smells.
//const int Smell1M[] =
{0x00000100,0x00000F00,0x00000D00,0x00000100,0x00000300};
//const int Smell1F[] =
{0x00000000,0x00000E00,0x00000F00,0x00000100,0x00000200};
//const int Smell2M[] = {0x00000F00,0x00000000,0x00000400,0x00000100,0x00000100};
//const int Smell2F[] =
{0x00000F00,0x00000100,0x00000100,0x00000100,0x00000000};
//const int Smell3M[] =
{0x00000200,0x00000100,0x00000100,0x00000E00,0x00000F00};
//const int Smell3F[] =
{0x00000100,0x00000000,0x00000200,0x00000F00,0x00000400};
//const int
SmellFood[]={0x00000F00,0x00000F00,0x00000F00,0x00000F00,0x00000F00};
//const int
SmellDead[]={0x00000100,0x00000200,0x00000200,0x00000300,0x00000300};
const int Smell1=0x000000FF;
const int Smell2=0x000000FF;
const int Smell3=0x000000FF;
const int SmellM=0x000000FF;
const int SmellF=0x00000000;
const int SmellFood=0x000000FF;
const int SmellDead=0x00000000;
/***************
Global World objects
***************/
//World list (all object in world),
//and dead list (dead objects that should be erased
off screen)
extern class Things *World, *Deadlist;
//Smell map for all the smells
extern class Smells *smellmap;
//Neighbor list, for finding nearby objects faster
extern struct Neighbor *nearlist;
//Output files
extern ofstream logfile;
extern ofstream timefile;
#endif
/*Bugs.h*/
#ifndef bugs_h
#define bugs_h
#include "NeuralNet.h"
#include "Thing.h"
class Bug:public Things {
public:
Bug();
Bug(Bug
©);
~Bug();
void
Cycle();
bool
gone();
bool
moveon();
int
GetEnergy();
int
GetAction(int i);
void
Emmit();
void
Smell();
int
Near(Things *&lst);
void
ExternalSense(int A1Sig[], int A2Sig[], int A3Sig[], bool Front, bool Back);
void
operator+(class Bug &rhs); //+
is the mating operator
void
operator-(class Bug &rhs); //-
is the attacking operator
void
operator+=(class Food &meal);//+= is the eating operator
friend
ostream & operator<<(ostream &out, Bug &B);
friend
istream & operator>>(istream &in, Bug &B);
protected:
int HP, //Hitpoints,
0=dead
AP, //Attack points, amount to decrease other hp by.
Energy, //Energy level, 0=starvation
TimeLeft, //Time left alive in cycles, 0=died
of old age
heading, //heading of bug in degree*1000000
Fitness; //Fitness of bug from 0 to 100
neuralnet
brain;
/*
********Basic
on off
Mate
> 1
Eat >
1
Attack
> 1
********Discretized
continuous numbers
TurnLeft
* 100
TurnRight
* 100
MoveForward
/ BASEONE
MoveBack
/ BASEONE
EmmitSmell[]
*/
neuralvec
actions;
/*
A1Sig[],
A2Sig[], A3Sig[] : chemcal strength at
left antenna, right, and back
HP,
Energy, posx, posy, heading : It can know certain values of its own state.
*/
neuralvec
senses;
};
class Bug1:public Bug {
public:
Bug1();
~Bug1();
void
operator+(class Bug1 &rhs); //+
is the mating operator
private:
};
class Bug2:public Bug {
public:
Bug2();
~Bug2();
void
operator+(class Bug2 &rhs); //+
is the mating operator
private:
};
class Bug3:public Bug {
public:
Bug3();
~Bug3();
void
operator+(class Bug3 &rhs); //+
is the mating operator
private:
};
#endif
/*********************************************************
Bugs class
Specifies 3 types of bugs
Each of the 3 type of bugs are derived from the bug
base class, and the bug base class is derived from
the
Things base class.
*********************************************************/
#include "memleak.h"
#include <stdlib.h>
#include <math.h>
#include <iostream.h>
#include "Constants.h"
#include "Obstacle.h"
#include "Neighbor.h"
#include "Smells.h"
#include "Bugs.h"
#include "Food.h"
#include "Thing.h"
/*********************************************************
Class functions
*********************************************************/
Bug::Bug() {
ID=ID_Bug; //Setup the ID tag, will be
overwritten
HP=100; //Setup
initial Health, will be overwritten
AP=0; //Setup
attack strength will be overwritten
mass=100; //Setup mass of bug
will be overwritten
Energy=100; //Setup the energy left will be
overwritten
TimeLeft=100; //Setup time bug has left to live will
be overwritten
Fitness=5000; //Give initial fitness (was added in
later trials)
heading=(rand()%360)*1000000; //Random initial heading
brain.setinputs(10+3*SigNum);//Setup
the input size
brain.setoutputs(3+SigNum); //8+SigNum-5 Setup output size
brain.addlayer(16); //Add a hidden
layer with 16 neurons
brain.randomize(); //Randomize
neural weights
actions.setsize(3+SigNum); //8+SigNum-5 ..Resize the actions vector
senses.setsize(10+3*SigNum);
//Resize the senses vector
senses[0]=BaseOne;
//The 0 sense is always BaseOne which
//maps to 1,
This allows weights to
//determine the threshold.
next=NULL;
//Clear next field used by link list.
}
Bug::Bug(Bug & copy) {
//Copy
constructor
ID=copy.ID; //Copy the Type ID
HP=copy.HP; //Copy the health
AP=copy.AP; //Copy the Attach strength
mass=copy.mass;
//Copy the mass
Energy=copy.Energy; //Copy energy level
TimeLeft=copy.TimeLeft;//Copy
lifetime left
heading=copy.heading; //Copy heading
brain=copy.brain; //Copy the brain neural net
actions=copy.actions; //Copy resulting actions
senses=copy.senses; //Copy the sense input
next=copy.next; //Copy the next pointer
}
Bug1::Bug1() {
//Instantiate
type 1 bug
if
(rand()%2==0) { //Randomize the assignemnt of male/female
//Male
SetSmell(2,Smell1);
SetSmell(0,SmellM);
ID=ID_Bug1M;
}
else {
//Female
SetSmell(2,Smell1);
SetSmell(0,SmellF);
ID=ID_Bug1F;
}
//Randomize
the starting position of this bug to be close to
//the
starting point of this group.
posx=group1x+rand()%200-100;
posy=group1y+rand()%200-100;
//If
position is off the screen, readjust to be on the edge
//I
don't want to send these bugs to the other side of the screen
if
(posx<0) posx=0;
if
(posx>maxX) posx=maxX;
if
(posy<0) posy=0;
if
(posy>maxY) posy=maxY;
//Setup
the variables to equal the amounts setup in the constants file.
HP=B1HP;
AP=B1AP;
mass=B1CorpseMass;
Energy=B1InfantEnergy;
TimeLeft=B1LifeTime;
}
Bug2::Bug2() {
//Instantiate
type 2 bug
if
(rand()%2==0) { //Randomize the
assignment of male/female
//Male
SetSmell(3,Smell2);
SetSmell(0,SmellM);
ID=ID_Bug2M;
}
else {
//Female
SetSmell(3,Smell2);
SetSmell(0,SmellF);
ID=ID_Bug2F;
}
//Randomize
the starting position of this bug to be close to
//the
starting point of this group.
posx=group2x+rand()%200-100;
posy=group2y+rand()%200-100;
//If
position is off the screen, readjust to be on the edge
//I
don't want to send these bugs to the other side of the screen
if
(posx<0) posx=0;
if
(posx>maxX) posx=maxX;
if
(posy<0) posy=0;
if
(posy>maxY) posy=maxY;
//Setup
the variables to equal the amounts setup in the constants file.
HP=B2HP;
AP=B2AP;
mass=B2CorpseMass;
Energy=B2InfantEnergy;
TimeLeft=B2LifeTime;
}
Bug3::Bug3() {
//Instantiate
type 3 bug
if
(rand()%2==0) { //Randomize the assignment of male/female
//Male
SetSmell(4,Smell3);
SetSmell(0,SmellM);
ID=ID_Bug3M;
}
else {
//Female
SetSmell(4,Smell3);
SetSmell(0,SmellF);
ID=ID_Bug3F;
}
//Randomize
the starting position of this bug to be close to
//the
starting point of this group.
posx=group3x+rand()%200-100;
posy=group3y+rand()%200-100;
//If
position is off the screen, readjust to be on the edge
//I
don't want to send these bugs to the other side of the screen
if
(posx<0) posx=0;
if
(posx>maxX) posx=maxX;
if
(posy<0) posy=0;
if
(posy>maxY) posy=maxY;
//Setup
the variables to equal the amounts setup in the constants file.
HP=B3HP;
AP=B3AP;
mass=B3CorpseMass;
Energy=B3InfantEnergy;
TimeLeft=B3LifeTime;
}
//Empty destructors
Bug::~Bug() {
}
Bug1::~Bug1() {
}
Bug2::~Bug2() {
}
Bug3::~Bug3() {
}
void div(int a[],int b, int c[]) {
//Helper
function to divide each smell in a by b and store in c
//Not
used anymore, was used in an earlier version
int i;
for
(i=0;i<SigNum;i++) {
c[i]=a[i]/b;
}
}
void Bug::Emmit() {
//Emmits
smell of bug, common for all bugs.
int x,y;
//Map
position onto the position for the smell map
x=posx>>4;
y=posy>>4;
//Sets smell
on the smell map to include smell emitted by bug
smellmap[maxx*(y)+(x)].SetSmell(Signal);
}
void Bug::Smell() {
//Bugs
sampling the smell map at three spots
int
s1[SigNum];
int
s2[SigNum];
int
s3[SigNum];
int x,y,
tmp;
//The following commented out code used to calculate
the three spots dynamically
//But was too slow, so I tried to use a static
mapping.
// int
y1,y2,x1,x2, x3, y3, tmpr;
// int
piover4;
// bool
fblock, bblock;
// double
adjhead;
//Heading are in degrees * 1000000, so adjhead would
be in radians.
// adjhead=(heading/180000000)*3.14159265358979323846264338327950288;
// piover4=(3.14159265358979323846264338327950288419
/ 4);
// y1=(int)(sin(adjhead+piover4)+0.5);
// x1=(int)(cos(adjhead+piover4)+0.5);
// y2=(int)(sin(adjhead-piover4)+0.5);
// x2=(int)(cos(adjhead-piover4)+0.5);
// y3=-(int)(sin(adjhead)+0.5);
// x3=-(int)(cos(adjhead)+0.5);
//Calculate
smell map position
x=posx>>4;
y=posy>>4;
//Static
spot below bug
tmp=maxx*(y+1)+x;
if
(tmp>=0 && tmp <maxall) smellmap[tmp].GetSmell(s3);
//Static
spot above and to right of bug
tmp=maxx*(y-1)+x+1;
if
(tmp>=0 && tmp <maxall) smellmap[tmp].GetSmell(s1);
//Static
spot above and to left of bug
tmp=maxx*(y-1)+x-1;
if
(tmp>=0 && tmp <maxall) smellmap[tmp].GetSmell(s2);
//Store
smell samples into sensors on bug.
ExternalSense(s1,s2,s3,0,0);
}
void Bug::ExternalSense(int A1Sig[], int A2Sig[],
int A3Sig[], bool Front, bool Back) {
//Commit
smell samples to bug sensors, Front and Back was used but is ignored now
int i, Sig1;
//For
each signal, store it in the senses after signal 7, and SigNum spaces apart.
//Allows
us to loop through SigNum only once, and store all three values semi-parallel
for(i=0;i<SigNum;i++)
{
senses[8+i]=A1Sig[i];
senses[8+SigNum+i]=A2Sig[i];
senses[8+SigNum+SigNum+i]=A3Sig[i];
}
Sig1=A1Sig[5]+A2Sig[5]+A3Sig[5]; //Signal 5 will be to tell other bugs to go to
head where I'm heading
senses[6]=Sig1; //Temporarily
store in location 6 of sense vector
}
void Bug::operator+(Bug &rhs) {
//+ is
the mating operator
Bug
*child;
//Create
a new bug
child=new
Bug;
//Set
heading to 0
child->heading=0;
//Copy
initiating parent's neural matrix
child->brain=brain;
//Do a
crossover with passive parent with CR_Rate specified in constants
child->brain.cross(rhs.brain,
CR_Rate);
//Mutate
the weights with a rate MU_Rate specified in constants
child->brain.mutate(MU_Rate);
//Insert
the Child into world
child->next=World;
World=child;
//Decrease
the energy of the parents
rhs.Energy-=AP*5;
Energy-=AP*5;
}
void Bug1::operator+(Bug1 &rhs) {
//+ is
the mating operator
Bug1
*child;
//Make
sure that both parents have enough energy and are old enough
if
(rhs.Energy>=B1EnergyNeed && Energy>=B1EnergyNeed
&&
rhs.TimeLeft<B1TimeLeft && TimeLeft<B1TimeLeft) {
//Create
new bug
child=new
Bug1;
//Randomize
heading
child->heading=rand()%360000000;
//Setup
position of child to be between parents
child->Setx((rhs.posx+posx)>>1);
child->Sety((rhs.posy+posy)>>1);
//Copy
the brain of active parent
child->brain=brain;
//Crossover
with teh brain of passive parent
child->brain.cross(rhs.brain,
CR_Rate);
//Mutate
the brain
child->brain.mutate(MU_Rate);
//Insert
the child into the beginning of the World link list
child->next=World;
World=child;
//Decrease
the energy of the parents
rhs.Energy-=B1EnergyNeed;
Energy-=B1EnergyNeed;
// logfile
<< "Mate Success!" << endl;
}
}
void Bug2::operator+(Bug2 &rhs) {
//+ is
the mating operator
Bug2
*child;
//Make
sure both parents have enough energy and are old enough
if
(rhs.Energy>=B2EnergyNeed && Energy>=B2EnergyNeed
&&
rhs.TimeLeft<B2TimeLeft && TimeLeft<B2TimeLeft) {
//Create
a new bug
child=new
Bug2;
//Randomize
heading
child->heading=rand()%360000000;
//Setup
position of child to be between parents
child->Setx((rhs.posx+posx)>>1);
child->Sety((rhs.posy+posy)>>1);
//Copy
the brain of active parent
child->brain=brain;
//Crossover
with teh brain of passive parent
child->brain.cross(rhs.brain,
CR_Rate);
//Mutate
the brain
child->brain.mutate(MU_Rate);
//Insert
the child into the beginning of the World link list
child->next=World;
World=child;
//Decrease
the energy of the parents
rhs.Energy-=B2EnergyNeed;
Energy-=B2EnergyNeed;
// logfile
<< "Mate Success!" << endl;
}
}
void Bug3::operator+(Bug3 &rhs) {
//+ is
the mating operator
Bug3
*child;
//Make
sure both parents have enough energy and are old enough
if
(rhs.Energy>=B3EnergyNeed && Energy>=B3EnergyNeed
&&
rhs.TimeLeft<B3TimeLeft && TimeLeft<B3TimeLeft) {
//Create
a new bug
child=new
Bug3;
//Randomize
heading
child->heading=rand()%360000000;
//Setup
position of child to be between parents
child->Setx((rhs.posx+posx)>>1);
child->Sety((rhs.posy+posy)>>1);
//Copy
the brain of active parent
child->brain=brain;
//Crossover
with teh brain of passive parent
child->brain.cross(rhs.brain,
CR_Rate);
//Mutate
the brain
child->brain.mutate(MU_Rate);
//Insert
the child into the beginning of the World link list
child->next=World;
World=child;
//Decrease
the energy of the parents
rhs.Energy-=B3EnergyNeed;
Energy-=B3EnergyNeed;
// logfile
<< "Mate Success!" << endl;
}
}
void Bug::operator-(Bug &rhs) {
//- is
the attacking operator
//The
bug attacked looses health based on the attack power of this bug
rhs.HP-=AP;
//In a
desparate attempt to protect itself, the other bug injures this bug
//But
only does damage of the other bug's attack power / 8
HP-=rhs.AP>>3;
//This
bug is tired from attacking, looses energy proportional to attack power
Energy-=AP;
}
void Bug::operator+=(Food &meal) {
int i;
//+= is
the eating operator
//One
mouthfull has 200*AP energy in it.
//Determine
if the food has enough for one mouthfull
if ((i=meal.GetMass())>AP*200)
{
//Take
one mouthfull
meal.Taken(AP*200);
Energy+=AP*200;
}
else {
//Take
what's left
meal.Taken(i);
Energy+=i;
}
}
void Bug::Cycle() {
//When
the world cycles through one instant, this is done for all bugs.
Things
*lst, *idx;
int i;
int
typ,match, dist;
//Decrease
lifetime by one
TimeLeft--;
//Decrease
energy by 1
Energy-=1;
//Copy
current value to sensors
senses[1]=HP;
senses[2]=Energy;
senses[3]=posx;
senses[4]=posy;
senses[5]=heading;
senses[7]=TimeLeft;
//Smell
the world to copy rest of values
Smell();
//Input
senses into neural net
brain.input(senses);
//Propagate
the values
brain.propagate();
//Retrieve
output
actions=brain.output();
// logfile
<< actions << endl;
//Determine
nearby items.
typ=Near(lst);
//We are
sensing some other bug's signal, pay attention to same type headings
match=(0xF0&ID);
if
(senses[6]>50) {
if
((typ&0xF0)==match) {
//Reset
sense 6 to 0
senses[6]=0;
//Go
through all the object in world
for(idx=lst;idx!=NULL;
idx=idx->lstnext) {
//If
it matches a bug of the same type
if
((idx->ID&0xF0)==match) {
//Randomly
or if this is the first one
if
(senses[6]==0 || rand()%2) {
//Set
sense 6 to be heading of other bug
//Bugs
can see where one of their friends is heading
senses[6]=((Bug
*)idx)->heading;
logfile
<< "We see the other bug of type " << idx->ID <<
" and we are type " << ID << endl;
}
}
}
}
}
else
//Sense 6 is 0 otherwise
senses[6]=0;
//Mate
> 1 Initiator neuron
//always
receptive to mating
//Type ID
of bugs with the same type but of the other gender
match=(0xF0&ID)
| ((0x03&ID)^0x03);
//If
mating activator on, and a compatible bug is nearby
if
(actions[0]>1 && ((typ&ID_Bug)==match)) {
//For
each nearby object
for(idx=lst;
idx!=NULL; idx=idx->lstnext) {
//Check
compatibility
if
(idx->ID==match) {
//Compatible
logfile
<< "Fitness for mating " << Fitness << endl;
Fitness+=100;
//Bugs
more likely to be successful if fitness is higher
if
(rand()%5000<Fitness) {
// logfile
<< "Type: " << ID << " - ";
// logfile
<< "Mates with Type:" << idx->ID << endl;
//Use
to correct mating operator for the type of bug
if
((ID&ID_Bug1)!=0)
*(Bug1
*)this+*(Bug1 *)idx;
if
((ID&ID_Bug2)!=0)
*(Bug2
*)this+*(Bug2 *)idx;
if
((ID&ID_Bug3)!=0)
*(Bug3
*)this + *(Bug3 *)idx;
//Only
one successful mate per cycle per bug
break;
}
}
}
}
//Eat > 1
if
(actions[1]>1 && ((typ&ID_Food)==ID_Food) ) {
//Go
through near list
for(idx=lst;
idx!=NULL; idx=idx->lstnext) {
//If
food
if
(idx->ID==ID_Food) {
//Increase
Fitness
Fitness+=5;
// logfile
<< "Type: " << ID << " - ";
// logfile
<< "Eats" << endl;
//Eat
some food
*this+=*(Food
*)idx;
//Eat
only one mouthfull per cycle
break;
}
}
}
//Attack
> 1
//Bugs
not of the same type
match=((ID
& 0xF0) ^ (ID_Bug1|ID_Bug2|ID_Bug3));
if
(actions[2]>1 && ((typ&match)!=0) ) {
//For
all the nearby things
for(idx=lst;
idx!=NULL; idx=idx->lstnext) {
//If
we have a bug of a different type
if
((idx->ID&match)!=0) {
Fitness+=25;
// logfile
<< "Type: " << ID << " - ";
// logfile
<< "Attacks Type " << idx->ID << endl;
//Attack
them
*this-*(Bug
*)idx;
//Only
one attack per cycle
break;
}
}
}
//*/
//We
want to make the bug tired for trying to mate, eat or attack
//And we
lower their fitness if they try
if
(actions[0]>1) {
Energy-=10;
Fitness-=1;
}
if
(actions[1]>1) {
Energy-=2;
Fitness-=2;
}
if
(actions[2]>1) {
Energy-=5;
Fitness-=3;
}
//TurnLeft
heading-=actions[3]*300;
//TurnRight
heading+=actions[4]*300;
//MoveForward
/ BASEONE
dist=actions[5]*5/BaseOne;
//MoveBack
/ BASEONE
dist-=actions[6]*2/BaseOne;
logfile
<< "Action1 " << actions[3] << "."
<< actions[3] << endl;
logfile
<< "Action2 " << actions[4] << "."
<< actions[4] << endl;
logfile
<< "Moved " << dist << " distance to "
<< heading/1000000 << "." << abs(heading %1000000)
<< endl;
//The
further a bug moved, the more energy is lost
Energy-=abs(dist);
//Move
the bug
Move(heading,
dist);
//Sets
the output smells, to the actions of the smell activators on the bug
for(i=0;i<SigNum-5;i++)
SetSmell(5+i,actions[i+7]);
}
int Bug::GetEnergy() {
//Return
energy left of bug
return
Energy;
}
bool Bug::gone() {
//Bug is
gone if it dies
//It can
die because it has negative energy
if
(Energy<0)
logfile
<< ID << "Type Died from Exhaustion" << endl;
//It can
also die because it has no health
if
(HP<0)
logfile
<< ID << "Type Died from Murder" << endl;
//It can
also die of old age
if
(TimeLeft<=0)
logfile
<< ID << "Type Died from Old Age" << endl;
//If the
bug is gone, return true
if
(Energy<0 || HP<0 || TimeLeft<=0) {
return
true;
}
//The
bug is still alive
return
false;
}
bool Bug::moveon() {
//We are
not able to move ontop of another bugs exact pixel location
return
false;
}
int Bug::Near(Things *&obj) {
//Determines
the objects near the bug
Neighbor
*idx;
Things
*lst;
int typ;
int pos,
i,j;
//Using
a square with a radius of 3 as a approximation to
//Speed
up cycle time
const
int radius=3;
//Initialize
return type, and list
typ=0;
lst=NULL;
//Determine
starting position (x-radius, y-radius)
pos=(posy-radius)*maxX+posx-radius;
//If it
is off the beginning corner or end corner, then readjust
//So no
exceptions occur
if
(pos<0) pos=0;
else if
(posy>=(maxY-2*radius)) pos=(maxY-2*radius)*maxX-radius;
//Searches
for a square of radius for objects
for
(i=0;i<2*radius;i++, pos+=maxX) {
for
(j=0;j<2*radius;j++,pos++) {
//Copies
everything in the linked list of the nearlist into the returning list of
objects
for(idx=nearlist[pos].next;idx!=NULL;idx=idx->next)
{
//Don't
copy itself
if
(idx->obj==this) continue;
//Or
the Bits of the Type ID of this object into the return type
typ=typ|idx->obj->ID;
//Add
the object into the near list
idx->obj->lstnext=lst;
lst=idx->obj;
}
}
}
/* This was the old code which scanned through the
world and determined if it was
within a certain distance of this bug, it increased
our order by a factor of N.
for(idx=World;idx!=NULL;idx=idx->next)
{
if
(idx!=this && Distance(*idx)<10) {
typ=typ|idx->ID;
if
(lst==NULL) {
lst=idx;
lst->lstnext=NULL;
}
else
{
idx->lstnext=lst;
lst=idx;
}
}
}
*/
//Return
the list and the type
obj=lst;
return
typ;
}
int Bug::GetAction(int i) {
//Return
the action vector of bug
return
actions[i];
}
ostream & operator<<(ostream &out, Bug
&B) {
//Stream
output operator just outputs all information of bug
//Used
for saving the bugs into a file
int i;
out
<< B.ID << endl;
out
<< B.posx << endl;
out
<< B.posy << endl;
out
<< B.mass << endl;
for
(i=0;i<SigNum;i++) {
out
<< B.Signal[i] << endl;
}
out
<< B.HP << endl;
out
<< B.AP << endl;
out
<< B.Energy << endl;
out
<< B.TimeLeft << endl;
out
<< B.heading << endl;
out
<< B.brain;
out
<< B.actions;
out
<< B.senses;
return
out;
}
istream & operator>>(istream &in, Bug
&B) {
//Stream
input operator sets bug information based on input
//Used
to load a bug that was saved with the << operator.
int i;
in
>> B.ID;
in
>> B.posx;
in
>> B.posy;
in
>> B.mass;
for
(i=0;i<SigNum;i++) {
in
>> B.Signal[i];
}
in
>> B.HP;
in
>> B.AP;
in
>> B.Energy;
in
>> B.TimeLeft;
in
>> B.heading;
in
>> B.brain;
in
>> B.actions;
in
>> B.senses;
return
in;
}
/*Expongen.c*/
#include <math.h>
#include <stdlib.h>
#include "expongen.h"
double rande(void) /*Functions*/
{ /*This function remaps the random*/
/*function to the range of 0-1*/
return
(float)(rand())/(float)RAND_MAX;
}
double EXP(double mean)
{ /* RETURNS EXPONENTIALLY DISTR RV */
double
result;
if (mean
<0.0) { /*Can't use negative values for mean*/
exit(1);
}
result =
- (mean) * log(rande()); /*Make it exponential*/
return(result); /*Return the
result*/
}
/******************************************************************
Food class
Derived from base class of thing
******************************************************************/
#include "memleak.h"
#include "Thing.h"
#include "Food.h"
#include "Bugs.h"
#include "Smells.h"
#include "Constants.h"
#include <stdlib.h>
Food::Food() {
//Set
the Food ID
ID=ID_Food;
//Set
the Mass of the food
mass=DefaultMass;
//Set
the time left before decay of food
decay=DecayTime<<3;
//Set
signal 1 of smell to food smell
SetSmell(1,SmellFood);
//If
randomFood flag set, randomize location based on center and radius
if
(randomFood) {
posx=foodXpos-foodRadius+rand()%(foodDiam);
posy=foodYpos-foodRadius+rand()%(foodDiam);
//If
off screen readjust position to be on screen again
if
(posx<0) posx+=foodRadius;
if
(posy<0) posy+=foodRadius;
if
(posy>=maxY) posy=posy>>1;
if
(posx>=maxX) posx=posx>>1;
}
else {
//Otherwise
just place at center location
posx=foodXpos;
posy=foodYpos;
}
//Place
item on neighbor list.
Move(0,0);
}
Food::Food(Bug &corpse) {
//Convert
a dead bug into a peice of food
ID=ID_Food;
SetSmell(1,SmellDead);
//The
mass of the food equals the nergy of the bug - some loss of energy
mass=corpse.GetEnergy()-EnergyLoss;
//Set
position equal to corpse position
posx=corpse.Getx();
posy=corpse.Gety();
//Set
Decay
decay=DecayTime;
//Place
item on neighbor list
Move(0,0);
}
Food::~Food() {
}
bool Food::gone() {
//Food
is gone if eaten or decayed
if
(decay==0 || mass<=0) return true;
return
false;
}
void Food::Taken(int amount) {
//Amount
is eaten from this food clump
mass-=amount;
}
void Food::Emmit() {
//Food
emits a smell
int
smell[SigNum];
GetSmell(smell);
smellmap[maxx*(Gety()>>4)+(Getx()>>4)].SetSmell(Signal);
}
void Food::Cycle() {
//Decay
the food by 1
decay--;
}
bool Food::moveon() {
//You
can move on the food, it is a small clump, a bug can walk on.
return
true;
}
int Food::GetAction(int i) {
//Food
doesn't have actions.
return
0;
}
/*NerualMatrix.cpp*/
#ifndef GUIMode
#include <iostream.h>
#endif
#include "memleak.h"
#include <stdlib.h>
#include <memory.h>
#include "NeuralNet.h"
#include "expongen.h"
/***********************************
Neural Matrix class
***********************************/
neuralmatrix::neuralmatrix(int r, int c) {
//Constructor to create matrix of size r X c
row=r;
col=c;
rowcol=r*c;
recval.setsize(col);
if
(rowcol==0) data=NULL;
else
data=new int[rowcol+1];
recmat=NULL;
next=NULL;
}
neuralmatrix::neuralmatrix(const neuralmatrix &
n) {
//Copy constructor
row=n.row;
col=n.col;
rowcol=n.rowcol;
recmat=new
neuralmatrix();
if
(n.recmat!=NULL)
*recmat=*n.recmat;
recval=n.recval;
if
(rowcol==0) data=NULL;
else
data=new int[rowcol+1];
memcpy(data,n.data,rowcol*sizeof(int));
next=NULL;
}
neuralmatrix::~neuralmatrix() {
//Destructor, frees memory.
if
(data!=NULL) delete [] data;
if
(recmat!=NULL) delete recmat;
data=NULL;
recmat=NULL;
}
void neuralmatrix::recurrent(bool flag) {
//Sets the recurrent mode
if
(flag) {
if
(recmat!=NULL) {
delete
recmat;
}
recmat=new
neuralmatrix(col,col);
recmat->randomize();
}
else {
if
(recmat!=NULL) {
delete
recmat;
}
}
}
void neuralmatrix::setsize(int r, int c) {
//Resizes the neural matrix
//Deletes and redeclares matrix space
if
(data!=NULL) {
delete
[] data;
data=NULL;
}
if
(recmat!=NULL) delete recmat;
recmat=NULL;
row=r;
col=c;
rowcol=r*c;
recval.setsize(c);
data=new
int[rowcol+1];
}
void neuralmatrix::reset() {
//Zero out the neural matrix
if
(data!=NULL) {
memset(data,0,rowcol*sizeof(int));
}
if
(recmat!=NULL) {
recmat->reset();
}
recval.reset();
}
void neuralmatrix::randomize() {
//Randomize the neural matrix.
int v;
if
(data!=NULL) {
for(int
i=0;i<rowcol;i++) {
v=rand()%BaseOne;
memcpy(&data[i],&v,sizeof(int));
}
}
recval.reset();
}
int neuralmatrix::get(int x, int y) {
//Retrieve a specific value from the neuralmatrix
if
(x<row && y<col) {
return
data[x*col+y];
}
return
0;
}
void neuralmatrix::setval(int r, int c, int value) {
//Set the value of a specific row and column to
value.
if
(r<row && c<col) {
data[r*col+c]=value;
}
}
//The overloaded = operator
neuralmatrix & neuralmatrix::operator=(const
neuralmatrix & copy) {
//Delete
data already in matrix
if
(data!=NULL) {
delete
[] data;
data=NULL;
}
if
(recmat!=NULL) {
delete
recmat;
recmat=NULL;
}
//Reset
row and column size
row=copy.row;
col=copy.col;
rowcol=copy.rowcol;
//copy
the recurrency matrix if not null.
if
(copy.recmat!=NULL) {
recmat=new
neuralmatrix;
*recmat=*copy.recmat;
}
else
recmat=NULL;
recval=copy.recval;
//Declare
new space if necessary
if
(rowcol==0) data=NULL;
else
data=new int[rowcol+1];
//Copy
the weights
memcpy(data,copy.data,rowcol*sizeof(int));
return
*this;
}
/* Index access overloaded operators */
//To write
int & neuralmatrix::operator[ ](int Index ) {
if(Index<0 || Index > rowcol) {
exit(1);
}
return
data[Index];
}
//To read
int neuralmatrix::operator[ ]( int Index ) const {
if(Index<0 || Index > rowcol) {
exit(1);
}
return
data[Index];
}
//Function to return row size
int neuralmatrix::rsize() {
return
row;
}
//Function to return column size
int neuralmatrix::csize() {
return
col;
}
void neuralmatrix::cross(const neuralmatrix &p2,
double rate) {
//Rate has floating point values from 0 to 1
//Crossover function, will cross this neural matrix
with p2, with the rate rate.
double
median;
unsigned
long int midx, ncount, at;
int
which;
//Calculate
the rate and
median=1.0/rate;
ncount=col*row;
at=0;
which=0;
//While
we haven't proecessed the whole weight matrix
while
(at<ncount) {
//Find
next crossover point
midx=(unsigned
long int)(EXP(median))+1;
if
(which==1) {
which=0;
if
(midx+at>ncount)
midx=ncount-at;
//Copy
from other matrix
memcpy(&data[at],&(p2.data[at]),midx*sizeof(int));
}
else
{
//Keep
values from this matrix
which=1;
}
at+=midx;
}
}
/***********************************************************
Applying matrix transforms with different methods of
learning
************************************************************/
void neuralmatrix::transform(neuralvec &from,
neuralvec &to, double reinforce, bool recur) {
int r, c,
speedup, speedup2;
long int
result;
int reinf;
neuralvec
inter(col);
//If
recurrency is on, and there is no recurrent information, then setup recurrent
info.
if
(recur && recmat==NULL)
recurrent(recur);
reinf=(int)(reinforce*BaseOne+0.5);
//If
recurrency mode, then increase the intermediate value by the result of the
recurrent values
if
(recur) {
recmat->transform(recval,inter,reinforce);
inter+=from;
}
//Error
check.
if
(row!=from.getsize()) {
cerr
<< "Inconsistent vector size for matrix" << endl;
exit(-1);
}
//Initialize
output vector
to.setsize(col);
to.reset();
//Loop
to transform
for
(r=0,speedup=0;r<row; r++) {
for
(c=0;c<col; c++, speedup++) {
speedup2=data[speedup];
//multiply
result=(from[r]*speedup2)/BaseOne;
//Add
to activation vector
to[c]+=result;
//Memory
degradation rate
//Active
Neuron connection reinforcement phase
data[speedup]=speedup2+(result*reinf-1)/BaseOne;
}
}
//Add
recurrent values and Store output for reccurent calculation in next cycle
if
(recur) {
to+=inter;
recval=to;
}
}
void neuralmatrix::transform(neuralvec &from,
neuralvec &to, double reinforce) {
//Transforms
the input from to the output to,
int r, c,
speedup, speedup2;
long int
result;
int reinf;
//Calculate
reinforcement factor
reinf=(int)(reinforce*BaseOne+0.5);
//Error
check.
if
(row!=from.getsize()) {
cerr
<< "Inconsistent vector size for matrix" << endl;
exit(-1);
}
//Setup
the output vector
to.setsize(col);
to.reset();
//Loop
through to calculate the transformation
for
(r=0,speedup=0;r<row; r++) {
for
(c=0;c<col; c++, speedup++) {
speedup2=data[speedup];
result=(from[r]*speedup2)/BaseOne;
to[c]+=result;
//Memory
degradation rate and
//Active
Neuron connection reinforcement phase
data[speedup]=speedup2+(result*reinf-1)/BaseOne;
}
}
}
/********* No learning on propagate ***********/
void neuralmatrix::transform(neuralvec &from,
neuralvec &to) {
//Transforms
the input from to the output to.
int r, c,
speedup;
//Error
check
if
(row!=from.getsize()) {
cerr
<< "Inconsistent vector size for matrix" << endl;
exit(-1);
}
//Setup
destination
to.setsize(col);
to.reset();
//Efficient
loop to multiply using integers
for
(r=0,speedup=0;r<row; r++) {
for
(c=0;c<col; c++, speedup++) {
to[c]+=(from[r]*data[speedup])/BaseOne;
}
}
}
/***********************************************************
End of Transforms section
***********************************************************/
ostream & operator<<(ostream & out,
neuralmatrix & m) {
//Output to
stream, allows saving to file
int i;
out
<< m.row << endl;
out
<< m.col << endl;
for
(i=0; i< m.col*m.row; i++) {
out
<< m[i] << endl;
}
return
out;
}
istream & operator>>(istream & in,
neuralmatrix & m) {
//Input
from stream, allows loading from file.
int
i,r,c;
in
>> r;
in
>> c;
if
(r<0 || c<0) return in;
m.setsize(r,c);
for
(i=0; i< m.col*m.row; i++) {
in
>> m[i];
}
return
in;
}
/*NeuralNet.cpp*/
#include "memleak.h"
#include <stdlib.h>
#include <memory.h>
#include <fstream.h>
#include <iostream.h>
#include <string.h>
#include "NeuralNet.h"
#include "expongen.h"
/****************************************
Neural Net Class
****************************************/
neuralnet::neuralnet(int insize, int outsize) {
//Constructor for the main neural net
//Setup the input storage, and output storage, and
//Setup the neural matrix.
inputhold.setsize(insize);
inputnodes=insize;
outputnodes=outsize;
outputhold.setsize(outsize);
network=new
neuralmatrix(insize,outsize);
network->next=NULL;
neurons=insize*outsize;
}
neuralnet::neuralnet(const neuralnet & copy) {
//Copy constructor copies everything
inputhold=copy.inputhold;
inputnodes=copy.inputnodes;
outputnodes=copy.outputnodes;
outputhold=copy.outputhold;
neuralmatrix
* idx=copy.network;
neurons=copy.neurons;
if
(idx!=NULL) {
network=new
neuralmatrix(*copy.network);
neuralmatrix
* idx2=network;
idx=idx->next;
//While
we have other hidden layers copy them
while
(idx!=NULL) {
idx2->next=new
neuralmatrix(*idx);
idx=idx->next;
idx2=idx2->next;
}
idx2->next=NULL;
}
}
neuralnet::~neuralnet() {
//Free up the memory used by the neural net.
neuralmatrix
*idx=network;
neuralmatrix
*idx2=idx;
idx=idx->next;
//Goes
through all the hidden layers
while(idx!=NULL)
{
delete
idx2;
idx2=idx;
idx=idx->next;
}
delete
idx2;
network=NULL;
}
void neuralnet::reset() {
//Resets all the weights in the neural net
neuralmatrix
*idx=network;
while
(idx!=NULL) {
idx->reset();
idx=idx->next;
}
}
void neuralnet::randomize() {
//Randomizes all the weights in the neural net
neuralmatrix
*idx=network;
while
(idx!=NULL) {
idx->randomize();
idx=idx->next;
}
}
ostream & operator<<(ostream &out,
neuralnet & n) {
//outputs all the information of a neural net into a
stream
neuralmatrix
*idx;
int i;
out
<< "NeuralNet" << endl;
out
<< n.inputnodes << endl;
out
<< n.outputnodes << endl;
for(idx=n.network,
i=0;idx!=NULL;idx=idx->next,i++);
out
<< i << endl;
for(idx=n.network;idx!=NULL;idx=idx->next)
{
out
<< *idx << endl;
}
return
out;
}
istream & operator>>(istream &in,
neuralnet & n) {
//Retrieves all information from the stream back
into neural net
neuralmatrix
*idx=n.network;
neuralmatrix
*idx2=idx;
neuralmatrix
tmp;
char
cmp[50];
int i;
in
>> cmp;
if
(strcmp(cmp,"NeuralNet")!=0) {
cerr
<< "Error loading NueralNet file wrong type." << endl;
}
in
>> n.inputnodes;
in
>> n.outputnodes;
in
>> i;
idx=idx->next;
while(idx!=NULL)
{
delete
idx2;
idx2=idx;
idx=idx->next;
}
delete
idx2;
idx=NULL;
n.network=NULL;
idx2=NULL;
while
(i>0) {
in
>> tmp;
idx=new
neuralmatrix(tmp);
idx->next=NULL;
if
(idx2==NULL) {
n.network=idx;
idx2=idx;
}
else
{
idx2->next=idx;
}
i--;
}
return
in;
}
void neuralnet::save(const char *st) {
//Saves to a file with name specified in st
neuralmatrix
*idx;
ofstream
savefile(st,ios::out);
savefile
<< "NeuralNet" << endl;
savefile
<< inputnodes << endl;
savefile
<< outputnodes << endl;
for(idx=network;idx!=NULL;idx=idx->next)
{
savefile
<< *idx << endl;
}
}
void neuralnet::load(const char *st) {
//Loads from a file with name specified in st
neuralmatrix
*idx=network;
neuralmatrix
*idx2=idx;
neuralmatrix
tmp;
char cmp[50];
ifstream
loadfile(st,ios::in);
loadfile
>> cmp;
if
(strcmp(cmp,"NeuralNet")!=0) {
cerr
<< "Error loading NueralNet file wrong type." << endl;
}
loadfile
>> inputnodes;
loadfile
>> outputnodes;
idx=idx->next;
while(idx!=NULL)
{
delete
idx2;
idx2=idx;
idx=idx->next;
}
delete
idx2;
idx=NULL;
while
(!loadfile.eof()) {
loadfile
>> tmp;
if
(idx==NULL) {
network=new
neuralmatrix(tmp);
idx=network;
}
else
{
idx->next=new
neuralmatrix(tmp);
idx=idx->next;
}
idx->next=NULL;
}
}
void neuralnet::mutate(double rate) {
//Rate has floating point values from 0 to 1
double
median;
unsigned
long int midx, ncount, at;
bool
done;
neuralmatrix
*idx;
median=1.0/rate;
done=false;
idx=network;
ncount=idx->csize()*idx->rsize();
at=0;
while
(!done) {
midx=(unsigned
long int)(EXP(median))+1;
while
(midx>0 && !done) {
if
(midx>ncount) {
midx-=ncount;
ncount=0;
if
(idx!=NULL) {
idx=idx->next;
at=0;
}
if
(idx!=NULL) {
ncount=idx->csize()*idx->rsize();
}
else
{
done=true;
}
}
else
{
(*idx)[at+midx-1]=rand()%BaseOne;
ncount-=midx;
at+=midx;
midx=0;
}
}
}
}
void neuralnet::addlayer(int size) {
//Add layer of size to neural net
neuralmatrix
*idx=network;
bool
flag;
int
rcount, ccount;
neuralmatrix
*old, *new1, *new2;
flag=true;
while
(idx!=NULL && idx->next!=NULL &&
idx->next->next!=NULL) {
idx=idx->next;
}
if
(idx->next==NULL) {
old=idx;
flag=false;
}
else
old=idx->next;
rcount=old->rsize();
ccount=old->csize();
neurons=neurons-rcount*ccount+rcount*size+ccount*size;
new1=new
neuralmatrix(rcount,size);
new2=new
neuralmatrix(size,ccount);
delete
old;
new2->next=NULL;
new1->next=new2;
if
(flag) idx->next=new1;
else
network=new1;
}
void neuralnet::setinputs(int size) {
//Set the input size
neuralmatrix
*idx;
inputnodes=size;
inputhold.setsize(size);
neurons=neurons-(inputnodes-size)*network->csize();
idx=new
neuralmatrix(size,network->csize());
idx->next=network->next;
delete
network;
network=idx;
}
void neuralnet::setoutputs(int size) {
//Set the output size
neuralmatrix
*idx, *idx2, *oidx;
bool
flag=true;
//Goes
to the end of the layer.
for
(idx=network, oidx=NULL;idx->next!=NULL; oidx=idx, idx=idx->next)
flag=false;
outputnodes=size;
outputhold.setsize(size);
neurons=neurons-(outputnodes-size)*idx->rsize();
idx2=new
neuralmatrix(idx->rsize(),size);
idx2->next=NULL;
if
(flag) {
delete network;
network=idx2;
}
else {
delete idx;
oidx->next=idx2;
}
}
void neuralnet::input(const neuralvec & nv) {
//Set the input vector
inputhold=nv;
}
neuralvec & neuralnet::output() {
//Return the output vector
return
outputhold;
}
void neuralnet::adjust(int layer, int row, int col,
int value) {
//Adjust the weight at a specific layer
neuralmatrix
*idx=network;
while
(idx!=NULL && layer>0) {
layer--;
idx=idx->next;
}
idx->setval(row,col,value);
}
neuralnet & neuralnet::operator=(const neuralnet
& copy) {
//Overloaded equals operator
inputhold=copy.inputhold;
inputnodes=copy.inputnodes;
outputnodes=copy.outputnodes;
outputhold=copy.outputhold;
neuralmatrix
* idx=copy.network;
neurons=copy.neurons;
if
(idx!=NULL) {
network=new
neuralmatrix(*copy.network);
neuralmatrix
* idx2=network;
idx=idx->next;
//Copies
all the layers
while
(idx!=NULL) {
idx2->next=new
neuralmatrix(*idx);
idx=idx->next;
idx2=idx2->next;
}
idx2->next=NULL;
}
return
*this;
}
int neuralnet::get(int row, int col) {
//Get a specific row and colum from the first layer
return
network->get(row,col);
}
neuralmatrix & neuralnet::getnet(int l) {
//Return the nueral matrix at the specified layer l.
neuralmatrix
* idx;
for(idx=network;l>1
&& idx!=NULL;l--,idx=idx->next);
return
*idx;
}
void neuralnet::cross(const neuralnet &p2,
double rate) {
//Rate has floating point values from 0 to 1
//Cross the current matrix with the other matrix
neuralmatrix
*idx;
neuralmatrix
*idx2;
idx=network;
idx2=p2.network;
//Go
through the weights in each layer
while
(idx!=NULL) {
//Cross
them with the corresponding layer in the other matrix
idx->cross(*idx2,rate);
idx=idx->next;
idx2=idx2->next;
}
}
void neuralnet::propagate(double reinforcement) {
//Propagate the input activation pattern through the
neural
//network and store the result in the outputhold
vector
neuralvec
a, b;
int state;
outputhold.reset();
neuralmatrix *idx;
b=inputhold;
state=0;
for(idx=network; idx!=NULL; idx=idx->next) {
//Alternate
between staes to save time from copying
//Source
and destination vectors
if
(state==0) {
if
(reinforcement==0) idx->transform(b,a);
else
idx->transform(b,a,reinforcement);
a.ApproxSigmoidThresh();
state=1;
}
else {
if
(reinforcement==0) idx->transform(a,b);
else
idx->transform(a,b,reinforcement);
b.ApproxSigmoidThresh();
state=0;
}
}
if
(state==1)
outputhold=a;
else
outputhold=b;
}
void neuralnet::rpropagate(double reinforcement) {
//Propagate the input activation pattern through the
neural
//network and store the result in the outputhold
vector
neuralvec
a, b;
int state;
outputhold.reset();
neuralmatrix *idx;
b=inputhold;
state=0;
for(idx=network; idx!=NULL; idx=idx->next) {
//Alternate
between staes to save time from copying
//Source
and destination vectors
if
(state==0) {
if
(reinforcement==0) idx->transform(b,a,0,true);
else
idx->transform(b,a,reinforcement,true);
a.ApproxSigmoidThresh();
state=1;
}
else {
if
(reinforcement==0) idx->transform(a,b,0,true);
else
idx->transform(a,b,reinforcement,true);
b.ApproxSigmoidThresh();
state=0;
}
}
if
(state==1)
outputhold=a;
else
outputhold=b;
}
/*NeuralVec.cpp*/
#include "memleak.h"
#include <stdlib.h>
#include <memory.h>
#include "NeuralNet.h"
#include <math.h>
/***********************************
Neural vector class
***********************************/
neuralvec::neuralvec(int s) {
size=s;
if
(s==0) data=NULL;
else
data=new int[s+1];
}
neuralvec::neuralvec(const neuralvec & n) {
size=n.size;
if
(size==0) data=NULL;
else
data=new int[size+1];
memcpy(data,n.data,size*sizeof(int));
}
neuralvec::~neuralvec() {
if
(data!=NULL) delete [] data;
data=NULL;
}
void neuralvec::setsize(int s) {
if
(data!=NULL) delete [] data;
size=s;
data=new
int[s+1];
}
int neuralvec::getsize() {
return
size;
}
void neuralvec::reset() {
if
(data!=NULL) {
memset(data,0,size*sizeof(int));
}
}
neuralvec & neuralvec::operator=(const neuralvec
& copy) {
if (data!=NULL)
delete [] data;
size=copy.size;
if
(size==0) data=NULL;
else
data=new int[size+1];
memcpy(data,copy.data,size*sizeof(int));
return
*this;
}
/* Index access overloaded operators */
int & neuralvec::operator[ ]( int Index ) {
if(Index<0
|| Index > size) {
exit(1);
}
return
data[Index];
}
int neuralvec::operator[ ]( int Index ) const {
if(Index<0 || Index > size) {
exit(1);
}
return
data[Index];
}
void neuralvec::operator+=(const neuralvec &rhs)
{
int i;
if (size==rhs.size)
{
for(i=0;i<size;i++)
data[i]+=rhs[i];
}
}
/************************************************
Thresholding functions for activation
************************************************/
void neuralvec::SignThresh() {
//Uses a signthreshold.
int i;
for(i=0;i<size;i++)
{
if
(data[i]>=0) data[i]=BaseOne;
else
if (data[i]<0) data[i]=-BaseOne;
}
}
void neuralvec::SigmoidThresh() {
//Implements the Sigmoid Threshold
int i;
for(i=0;i<size;i++)
{
data[i]=(int)(BaseOne/(1+exp(-(data[i]/(double)BaseOne)))+0.5);
}
}
void neuralvec::ApproxSigmoidThresh() {
//Approximates the Sigmoid Threshold
int i;
for(i=0;i<size;i++)
{
if
(data[i]<-5000) data[i]=0;
else
if (data[i]>5000) data[i]=BaseOne;
else
data[i]=(data[i]+5000)*BaseOne/10000;
}
}
void neuralvec::StepThresh() {
//Uses A step threshhold
int i;
for(i=0;i<size;i++)
{
if
(data[i]>=500) data[i]=BaseOne;
else
if (data[i]<500) data[i]=0;
}
}
/*************************************************/
ostream & operator << (ostream &out,const
neuralvec &obj) {
//Stream
output for saving
int i;
out
<< obj.size << endl;
for(i=0;i<obj.size;i++)
{
out
<< (obj.data[i]) << endl;
}
return
out;
}
istream & operator >> (istream
&in,neuralvec &obj) {
//Stream
input for loading
int i;
in
>> i;
obj.setsize(i);
for(i=0;i<obj.size;i++)
{
in
>> obj.data[i];
}
return
in;
}
/*Obstacle.cpp*/
#include "memleak.h"
#include "Obstacle.h"
#include "Thing.h"
Obstacle::Obstacle() {
ID=ID_Obstacle;
}
void Obstacle::Cycle() {
}
bool Obstacle::gone() {
return
false;
}
void Obstacle::Emmit() {
}
bool Obstacle::moveon() {
return
false;
}
int Obstacle::GetAction(int i) {
return
0;
}
/*Smells.cpp*/
#include "memleak.h"
#include "Constants.h"
#include "Smells.h"
Smells::Smells() {
for (int
i=0; i<SigNum; i++) {
Signal[i]=0;
Osignal[i]=0;
}
}
Smells::~Smells() {
}
void Smells::Cycle(Smells &a,Smells &
b,Smells & c, Smells & d) {
int i;
for
(i=0;i<SigNum;i++) {
//Direct
neighbors get 1/8 of the smell
a.Signal[i]+=(Osignal[i]>>4);
b.Signal[i]+=(Osignal[i]>>4);
c.Signal[i]+=(Osignal[i]>>4);
d.Signal[i]+=(Osignal[i]>>4);
//Cap
the maximum
if
((unsigned)Signal[i]>(unsigned)0x0FFFFFFF) Signal[i]=0x0FFFFFFF;
Osignal[i]=(Signal[i]>>1)+(Signal[i]>>2);
//if
(Osignal[i]>=0x000F) Osignal[i]-=0x000F;
Signal[i]=Osignal[i];
}
}
void Smells::SetSmell(int smellnum, int strength) {
//Increases the smell in the region by amount
specified by strength
if
(Signal[smellnum]<SmellMAX)
Signal[smellnum]+=strength;
if
(Signal[smellnum]<0) Signal[smellnum]=0;
}
void Smells::SetSmell(const int smell[]) {
//Increases the smell int the region by a smell
vector
for (int
i=0;i<SigNum;i++) {
if
(Signal[i]<SmellMAX) {
Signal[i]+=smell[i];
if
(Signal[i]<0) Signal[i]=0;
}
}
}
int Smells::GetSmell(int smellnum) {
//Gets a specific smell
return
Osignal[smellnum];
}
void Smells::GetSmell(int smellnum[]) {
//Gets a smell array
int i;
for
(i=0; i<SigNum; i++) {
smellnum[i]=Osignal[i];
}
}
bool Smells::GetBlock() {
return
blocked;
}
/*Things.cpp*/
#include "memleak.h"
#include <stdlib.h>
#include <math.h>
#include "Constants.h"
#include "Neighbor.h"
#include "Smells.h"
#include "Thing.h"
#include "Obstacle.h"
Things::Things() {
posx=rand()%maxX;
posy=rand()%maxY;
oldx=0;
oldy=0;
next=NULL;
mass=0;
for (int
i=0; i<SigNum; i++) {
Signal[i]=0;
}
}
Things::~Things() {
int ref;
Neighbor
*idx,*oidx;
Things
*cpy;
//Add it
to the dead list so the draw function can erase it from the screen
if
(DRAWON) {
cpy=new
Obstacle;
cpy->oldx=cpy->posx=oldx;
cpy->oldy=cpy->posy=oldy;
cpy->ID=ID;
cpy->next=Deadlist;
Deadlist=cpy;
}
//Delete
it from the neighborhood list also
ref=posx+posy*maxX;
for(idx=nearlist[ref].next,
oidx=NULL;idx!=NULL && idx->obj!=this; oidx=idx, idx=idx->next);
if
(idx!=NULL) {
if
(oidx!=NULL) {
oidx->next=idx->next;
delete
idx;
}
else
{
nearlist[ref].next=idx->next;
delete
idx;
}
}
}
int Things::Getx() {
return
posx;
}
int Things::Gety() {
return
posy;
}
int Things::Getox() {
return
oldx;
}
int Things::Getoy() {
return
oldy;
}
void Things::UpdatePos() {
oldx=posx;
oldy=posy;
}
int Things::GetMass() {
return
mass;
}
void Things::SetSmell(int smellnum, int strength) {
Signal[smellnum]=strength;
}
void Things::SetSmell(const int smell[]) {
for (int
i=0;i<SigNum;i++) {
Signal[i]=smell[i];
}
}
int Things::GetSmell(int smellnum) {
return
Signal[smellnum];
}
void Things::GetSmell(int smell[]) {
int i;
for
(i=0;i<SigNum;i++) {
smell[i]=Signal[i];
}
}
void Things::clean() {
}
void Things::SetMass(int m) {
mass=m;
}
void Things::Setx(int x) {
posx=x;
}
void Things::Sety(int y) {
posy=y;
}
void Things::Move(int dir, int dist) {
double
tmp;
Neighbor
*idx, *oidx;
int ref;
tmp=dir/(double)180000000*3.1415926535897932384626433832795028841971693993751058;
ref=posx+posy*maxX;
//Remobes
the object from the current neighborhood map
for(idx=nearlist[ref].next,
oidx=NULL;idx!=NULL && idx->obj!=this; oidx=idx, idx=idx->next);
if
(idx!=NULL) {
if
(oidx!=NULL) {
oidx->next=idx->next;
}
else
{
nearlist[ref].next=idx->next;
}
}
posy+=(int)(dist*sin(tmp));
posx+=(int)(dist*cos(tmp));
/* Add / at beginning of this line to use wrap, take
off to use Stop
//Wrap
around bounds
if
(posx>maxX) posx-=maxX;
if
(posx<0) posx+=maxX;
if
(posy>maxY) posy-=maxY;
if
(posy<0) posy+=maxY;
/*/
//Stop
at edge
if
(posx>maxX) posx=maxX;
if
(posx<0) posx=0;
if
(posy>maxY) posy=maxY;
if
(posy<0) posy=0;
//*/
ref=posx+posy*maxX;
//Place
object at the new location on the neighborhood map
if
(idx==NULL) idx=new struct Neighbor;
idx->next=nearlist[ref].next;
idx->obj=this;
nearlist[ref].next=idx;
}
int Things::Distance(class Things &obj) {
//Estimation
of the distance
return
abs(obj.posx-posx)+abs(obj.posy-posy);
}
bool Things::InTheWay(int dir, int dist, class
Things &obj) {
//Determine
if some object is in the way and can't move ontop of it.
int ny,
nx;
double
tmp;
tmp=dir/(double)180000000*3.1415926535897932384626433832795028841971693993751058;
ny=posy+(int)(dist*sin(tmp));
nx=posx+(int)(dist*cos(tmp));
if
(ny==obj.posy && nx==obj.posx && !obj.moveon()) return true;
return
false;
}
/*World.cpp*/
#include "memleak.h"
#include <time.h>
#include <sys/timeb.h>
#include <sys/types.h>
#include <fstream.h>
#include "World.h"
#include "Constants.h"
#include "Smells.h"
#include "Obstacle.h"
#include "Bugs.h"
#include "Food.h"
#include "Thing.h"
#include "Neighbor.h"
//Timer function for efficiency checking
void timefunc(char *message) {
static int go=0;
struct timeb timeptr;
static unsigned int timestart;
unsigned int timestop;
if (go==0) {
ftime(&timeptr);
timestart=timeptr.millitm+1000*timeptr.time;
go=1;
}
else {
ftime(&timeptr);
timestop=timeptr.millitm+1000*timeptr.time;
go=0;
timefile
<< message << " took " << timestop-timestart
<< " seconds at " << timestart << endl;
}
}
//Displays the statistics of population size
void ShowStats(HDC hdc) {
RECT
a={maxX+50,50,maxX+200,maxY};
char
num[50];
TextOut(hdc,maxX+55,
50,"Type 1 Population:",17);
TextOut(hdc,maxX+55,
100,"Type 2 Population:",17);
TextOut(hdc,maxX+55,
150,"Type 3 Population:",17);
TextOut(hdc,maxX+60,
200,"Food Available:",15);
a.top=70;
a.bottom=100;
itoa(num1Left,num,10);
FillRect(hdc,
&a, (HBRUSH)GetStockObject(WHITE_BRUSH));
TextOut(hdc,maxX+55,
70,num,strlen(num));
a.top=120;
a.bottom=150;
FillRect(hdc,
&a, (HBRUSH)GetStockObject(WHITE_BRUSH));
itoa(num2Left,num,10);
TextOut(hdc,maxX+55,
120,num,strlen(num));
a.top=170;
a.bottom=200;
FillRect(hdc,
&a, (HBRUSH)GetStockObject(WHITE_BRUSH));
itoa(num3Left,num,10);
TextOut(hdc,maxX+55,
170,num,strlen(num));
a.top=220;
a.bottom=250;
FillRect(hdc,
&a, (HBRUSH)GetStockObject(WHITE_BRUSH));
itoa(foodLeft,num,10);
TextOut(hdc,maxX+60,
220,num,strlen(num));
}
//Displays the smell map after converting it into a
colormap
void ShowSmellMap(HDC hdc) {
int x,
y, idx,i;
int a1,
a2, a3;
int
smell[SigNum], bugsmell, signal;
HBRUSH
B;
COLORREF
C;
RECT
a={maxX+32,maxY-200,maxX+224,maxY+256};
// FillRect(hdc,
&a, (HBRUSH)GetStockObject(WHITE_BRUSH));
/*xdiff=3
pix per region
ydiff=5
pix per region
*/
//For
each of the regions
for(y=0,
idx=0;y<48;y++) {
for
(x=0;x<64; x++, idx++) {
//Setup
the map block
a.left=maxX+32+3*x;
a.top=maxY-200+5*y;
a.right=maxX+32+3*x+3;
a.bottom=maxY-195+5*y;
//Retrieve
smell
smellmap[idx].GetSmell(smell);
//Compile
color for bugs
bugsmell=smell[2]+smell[3]+smell[4];
//Compile
color for signals
signal=0;
for(i=0;i<SigNum-5;i++)
{
signal+=smell[5+i];
}
//Food
is it's own color
//Make
sure we don't have any negative smells
if
(bugsmell<0) bugsmell=0;
if
(smell[1]<0) smell[1]=0;
if
(signal<0) signal=0;
a1=0;
a2=0;
a3=0;
//Use
a table to convert signal strength to color
for(i=0;i<SCTnum;i++)
{
if
(bugsmell>=SmellConvBound[i]) a1=SmellConvVal[i];
if
(smell[1]>=SmellConvBound[i]) a2=SmellConvVal[i]<<8;
if
(signal>=SmellConvBound[i]) a3=SmellConvVal[i]<<16;
/*
Old smell code which used least significant byte as color
if
(smell[0]>0x00FF) a1=0x00FF0000;
else
a1=(smell[0]<<16)&0x00FF0000;
if
(smell[1]>0x00FF) a2=0x00FF00;
else
a2=(smell[1]<<8)&0x00FF00;
if
(smell[2]>0x00FF) a3=0x00FF;
else
a3=(smell[2])&0x00FF;
*/
}
//Mix
the colors together
C=(a1
| a2 | a3);
//Create
a brush with that color
B=CreateSolidBrush(C);
//Draw
the rectangle
FillRect(hdc,
&a, B);
//Erase
the color
DeleteObject(B);
}
}
}
void ClearWorld() {
//Clear
the world of all things.
Things
*idx, *tmp;
for(idx=World,
World=NULL;idx!=NULL;tmp=idx, idx=idx->next, delete tmp);
}
void prune(int type1, int type2, int type3) {
//Prune the number of bugs, for population control
//parameters specify the number of bugs of each type
to prune
//If 0 or less, none of that type is pruned.
Things
*idx, *pidx;
int
t1,t2,t3;
t1=0;
t2=0;
t3=0;
//Loop
through world
for(idx=World,
pidx=NULL;idx!=NULL;pidx=idx, idx=idx->next) {
//If
object is type 1 and we haven't met our prune quota
if
(t1<type1 && (idx->ID&ID_Bug1)) {
if
(rand()%5) { //20% Chance of being
killed
if
(pidx!=NULL) {
pidx->next=idx->next;
delete
idx;
idx=pidx;
t1++;
}
}
continue;
}
//If
object is type 2 and we haven't met our prune quota
if
(t2<type2 && (idx->ID&ID_Bug2)) {
if
(rand()%5) { //20% Chance of being
killed
if
(pidx!=NULL) {
pidx->next=idx->next;
delete
idx;
idx=pidx;
t2++;
}
}
continue;
}
//If
object is type 3 and we haven't met our prune quota
if
(t3<type3 && (idx->ID&ID_Bug3)) {
if
(rand()%5) { //20% Chance of being
killed
if
(pidx!=NULL) {
pidx->next=idx->next;
delete
idx;
idx=pidx;
t3++;
}
}
continue;
}
}
}
void CycleSmell() {
//Every
cycle, we cycle the smell.
int i;
Smells
tmp;
//For
each region Cycle the smellregion with the four adjacent neighbors as it's
input.
//If it
is on a edge or corner, use a dummy region as input.
for
(i=0; i<(maxx*maxy); i++) {
if
(i==0) //upper
left
smellmap[i].Cycle(smellmap[i+1],tmp,smellmap[i+maxx],tmp);
else
if (i==maxx-1) //upper
right
smellmap[i].Cycle(tmp,smellmap[i-1],smellmap[i+maxx],tmp);
else
if (i==maxy*maxx-1) //lower right
smellmap[i].Cycle(tmp,smellmap[i-1],tmp,smellmap[i-maxx]);
else
if (i==(maxy-1)*maxx)//lower left
smellmap[i].Cycle(smellmap[i+1],tmp,tmp,smellmap[i-maxx]);
else
if ((i)%maxx==0) //left
smellmap[i].Cycle(smellmap[i+1],tmp,smellmap[i+maxx],smellmap[i-maxx]);
else
if ((i+1)%maxx==0) //right
smellmap[i].Cycle(tmp,smellmap[i-1],smellmap[i+maxx],smellmap[i-maxx]);
else
if (i<maxx) //upper
smellmap[i].Cycle(smellmap[i+1],smellmap[i-1],smellmap[i+maxx],tmp);
else
if (i>(maxy-1)*maxx) //lower
smellmap[i].Cycle(tmp,smellmap[i-1],tmp,smellmap[i-maxx]);
else
smellmap[i].Cycle(smellmap[i+1],smellmap[i-1],smellmap[i+maxx],smellmap[i-maxx]);
}
}
void Cycle() {
//Cycle through the whole world
Things
*idx, *pidx;
bool
notdead=false;
int i;
//World time is increased.
worldtime++;
//Auto feeder enabled and not enough food left
if
(autoFeed && foodLeft<foodLev) {
i=(foodLev-foodLeft);
//Generate
Some Food
while
(i>0) {
idx=new
Food();
idx->next=World;
World=idx;
i--;
}
}
num1Left=0;
num2Left=0;
num3Left=0;
foodLeft=0;
//Cycle
through the world
for
(idx=World,pidx=NULL;idx!=NULL;pidx=idx, idx!=NULL?idx=idx->next:idx=NULL)
{
//Delete
dead objects
if
(idx->gone()) {//IF gone
//If
corpse, replace bug with food
if
((idx->ID&ID_Bug)!=0) {//If is bug
if
(pidx!=NULL) {//If a
idx->clean();
pidx->next=new
Food((*(class Bug *)idx));
pidx->next->next=idx->next;
delete
idx;
idx=pidx->next;
}
else
{
idx->clean();
pidx=new
Food((*(class Bug *)idx));
pidx->next=idx->next;
World=pidx;
delete
idx;
idx=pidx->next;
pidx=NULL;
}//end
If a
}
//Delete
gone object
else
{//else not bug
if
(pidx!=NULL) {//If not on first object
pidx->next=idx->next;
idx->clean();
delete
idx;
idx=pidx->next;
}
else
{
World=idx->next;
idx->clean();
delete
idx;
idx=World;
pidx=NULL;
break;
}//End
not on first object
}//End
else not bug
}//Else
of gone
else
{
//Cycles
and moves
idx->Cycle();
//emmits
smells
idx->Emmit();
//Counts
objects
switch
(idx->ID) {
case
ID_Food:
foodLeft++;
break;
case
ID_Bug1M:
num1Left++;
break;
case
ID_Bug1F:
num1Left++;
break;
case
ID_Bug2M:
num2Left++;
break;
case
ID_Bug2F:
num2Left++;
break;
case
ID_Bug3M:
num3Left++;
break;
case
ID_Bug3F:
num3Left++;
break;
}//End
switch
}//End
else gone
}//End
for loop
if (!notdead)
{
//logfile
<< "The Simulation of the bug world has ended at " <<
worldtime << " cycles." << endl;
//ClearWorld();
worldtime=0;
}
//Prunes
world
prune(num1Left-1000,num2Left-1000,num3Left-1000);
}
void Draw(HDC hdc, BITMAP s_bug1M, BITMAP s_bug1F,
BITMAP s_bug2M, BITMAP s_bug2F,
BITMAP s_bug3M, BITMAP s_bug3F, BITMAP
s_Food, HDC hdcBug1M, HDC hdcBug1F,
HDC hdcBug2M, HDC hdcBug2F, HDC hdcBug3M, HDC
hdcBug3F, HDC hdcFood) {
//This function draws world and is not within the
scope of my comments.
Things
*idx, *pidx;
HBRUSH
pen1,pen2,pen3,pen4, whitepen;
RECT r;
bool
notdead=false;
pen1=CreateSolidBrush((COLORREF)0x000000CF);
pen2=CreateSolidBrush((COLORREF)0x0000CF00);
pen3=CreateSolidBrush((COLORREF)0x00CF0000);
pen4=CreateSolidBrush((COLORREF)0x00000000);
whitepen=CreateSolidBrush((COLORREF)0x00FFFFFF);
num1Left=0;
num2Left=0;
num3Left=0;
foodLeft=0;
for
(idx=Deadlist,pidx=NULL;idx!=NULL;pidx=idx,idx!=NULL?idx=idx->next:idx=NULL,
delete pidx) {
switch
(idx->ID) {
case
ID_Bug1M:
BitBlt(hdc,
idx->Getox(), idx->Getoy(), s_bug1M.bmWidth, s_bug1M.bmHeight, hdcBug1M,
0, 0, WHITENESS);
break;
case
ID_Bug1F:
BitBlt(hdc,
idx->Getox(), idx->Getoy(), s_bug1F.bmWidth, s_bug1F.bmHeight, hdcBug1F,
0, 0, WHITENESS);
break;
case
ID_Bug2M:
BitBlt(hdc,
idx->Getox(), idx->Getoy(), s_bug2M.bmWidth, s_bug2M.bmHeight, hdcBug2M,
0, 0, WHITENESS);
break;
case
ID_Bug2F:
BitBlt(hdc,
idx->Getox(), idx->Getoy(), s_bug2F.bmWidth, s_bug2F.bmHeight, hdcBug2F,
0, 0, WHITENESS);
break;
case
ID_Bug3M:
BitBlt(hdc,
idx->Getox(), idx->Getoy(), s_bug3M.bmWidth, s_bug3M.bmHeight, hdcBug3M,
0, 0, WHITENESS);
break;
case
ID_Bug3F:
BitBlt(hdc,
idx->Getox(), idx->Getoy(), s_bug3F.bmWidth, s_bug3F.bmHeight, hdcBug3F,
0, 0, WHITENESS);
break;
case
ID_Food:
BitBlt(hdc,
idx->Getox(), idx->Getoy(), s_Food.bmWidth, s_Food.bmHeight, hdcFood, 0,
0, WHITENESS);
break;
}
if
(ShowSig && (idx->ID&ID_Bug)>0) {
r.bottom=idx->Getoy()+1;
r.right=idx->Getox()+9;
r.top=r.bottom-5;
r.left=r.right-18;
FillRect(hdc,&r,whitepen);
}
}
Deadlist=NULL;
//*
Actual drawing onto screen of stuff
for
(idx=World,pidx=NULL;idx!=NULL;pidx=idx, idx!=NULL?idx=idx->next:idx=NULL) {
//Clears
the object off screen
switch
(idx->ID) {
case
ID_Bug1M:
BitBlt(hdc,
idx->Getox(), idx->Getoy(), s_bug1M.bmWidth, s_bug1M.bmHeight, hdcBug1M,
0, 0, WHITENESS);
break;
case
ID_Bug1F:
BitBlt(hdc,
idx->Getox(), idx->Getoy(), s_bug1F.bmWidth, s_bug1F.bmHeight, hdcBug1F,
0, 0, WHITENESS);
break;
case
ID_Bug2M:
BitBlt(hdc,
idx->Getox(), idx->Getoy(), s_bug2M.bmWidth, s_bug2M.bmHeight, hdcBug2M,
0, 0, WHITENESS);
break;
case
ID_Bug2F:
BitBlt(hdc,
idx->Getox(), idx->Getoy(), s_bug2F.bmWidth, s_bug2F.bmHeight, hdcBug2F,
0, 0, WHITENESS);
break;
case
ID_Bug3M:
BitBlt(hdc,
idx->Getox(), idx->Getoy(), s_bug3M.bmWidth, s_bug3M.bmHeight, hdcBug3M,
0, 0, WHITENESS);
break;
case
ID_Bug3F:
BitBlt(hdc,
idx->Getox(), idx->Getoy(), s_bug3F.bmWidth, s_bug3F.bmHeight, hdcBug3F,
0, 0, WHITENESS);
break;
case
ID_Food:
BitBlt(hdc,
idx->Getox(), idx->Getoy(), s_Food.bmWidth, s_Food.bmHeight, hdcFood, 0,
0, WHITENESS);
break;
}
if
(ShowSig && (idx->ID&ID_Bug)>0) {
r.bottom=idx->Getoy()+1;
r.right=idx->Getox()+9;
r.top=r.bottom-5;
r.left=r.right-18;
FillRect(hdc,&r,whitepen);
}
//Update
last draw position
idx->UpdatePos();
if
(ShowSig) {
r.bottom=idx->Gety();
r.right=idx->Getx()+9;
r.top=r.bottom-4;
if
(idx->GetAction(0)>1) {//Mate
r.left=r.right-2;
FillRect(hdc,&r,pen1);
r.right-=4;
}
if
(idx->GetAction(1)>1) {//Eat
r.left=r.right-2;
FillRect(hdc,&r,pen2);
r.right-=4;
}
if
(idx->GetAction(2)>1) {//Attack
r.left=r.right-2;
FillRect(hdc,&r,pen3);
r.right-=4;
}
if
(idx->GetAction(7)>1) {//Signal
r.left=r.right-2;
FillRect(hdc,&r,pen4);
}
}
//Draws
the object on screen
switch
(idx->ID) {
case
ID_Food:
foodLeft++;
BitBlt(hdc,
idx->Getx(), idx->Gety(), s_Food.bmWidth, s_Food.bmHeight, hdcFood, 0, 0,
SRCCOPY);
break;
case
ID_Bug1M:
num1Left++;
BitBlt(hdc,
idx->Getx(), idx->Gety(), s_bug1M.bmWidth, s_bug1M.bmHeight, hdcBug1M, 0,
0, SRCCOPY);
break;
case
ID_Bug1F:
num1Left++;
BitBlt(hdc,
idx->Getx(), idx->Gety(), s_bug1F.bmWidth, s_bug1F.bmHeight, hdcBug1F, 0,
0, SRCCOPY);
break;
case
ID_Bug2M:
num2Left++;
BitBlt(hdc,
idx->Getx(), idx->Gety(), s_bug2M.bmWidth, s_bug2M.bmHeight, hdcBug2M, 0,
0, SRCCOPY);
break;
case
ID_Bug2F:
num2Left++;
BitBlt(hdc,
idx->Getx(), idx->Gety(), s_bug2F.bmWidth, s_bug2F.bmHeight, hdcBug2F, 0,
0, SRCCOPY);
break;
case
ID_Bug3M:
num3Left++;
BitBlt(hdc,
idx->Getx(), idx->Gety(), s_bug3M.bmWidth, s_bug3M.bmHeight, hdcBug3M, 0,
0, SRCCOPY);
break;
case
ID_Bug3F:
num3Left++;
BitBlt(hdc,
idx->Getx(), idx->Gety(), s_bug3F.bmWidth, s_bug3F.bmHeight, hdcBug3F, 0,
0, SRCCOPY);
break;
}//End
switch
}//End
for loop
DeleteObject(pen1);
DeleteObject(pen2);
DeleteObject(pen3);
DeleteObject(pen4);
DeleteObject(whitepen);
}//End cycle
void DoMyExit() {
ClearWorld();
DeleteSmell();
deletenearlist();
logfile.close();
timefile.close();
// if (smellmap!=NULL)
// delete smellmap[];
}
void deletenearlist() {
//Deletes
the neighborhood list
Neighbor
*idx, *oidx;
int i;
for(i=0;i<maxX*maxY;
i++) {
for(idx=nearlist[i].next,oidx=NULL;idx!=NULL;oidx=idx,idx=idx->next,delete
oidx);
}
delete
[] nearlist;
}
void DeleteSmell() {
//Delete
all the smells
delete
[] smellmap;
}
void Begin(HWND hwnd) {
//Runs
whenever we add objects
int i;
Things
*idx;
//Type 1
Bugs
i=num1Bugs;
while
(i>0) {
idx=new
Bug1();
idx->next=World;
World=idx;
i--;
}
//Type 2
Bugs
i=num2Bugs;
while
(i>0) {
idx=new
Bug2();
idx->next=World;
World=idx;
i--;
}
//Type 3
Bugs
i=num3Bugs;
while
(i>0) {
idx=new
Bug3();
idx->next=World;
World=idx;
i--;
}
//Food
i=numFood;
while
(i>0) {
idx=new
Food();
idx->next=World;
World=idx;
i--;
}
//Wrap
around bounds
if
(idx->Getx()>maxX) idx->Setx(idx->Getx()-maxX);
if
(idx->Getx()<0) idx->Setx(maxX+idx->Getx());
if
(idx->Gety()>maxY) idx->Sety(idx->Gety()-maxY);
if
(idx->Gety()<0) idx->Sety(maxY+idx->Gety());
RECT
b={0,0,maxX,maxY};
//Forces
a refresh
InvalidateRect(hwnd,&b,1);
}
void SaveWorld(char *filename) {
//Save
all the bugs in the world
Things
*idx;
ofstream
savefile(filename);
int
num=0;
for(idx=World;idx!=NULL;idx=idx->next)
{
if
((idx->ID & ID_Bug)!=0) num++;
}
savefile
<< num << endl;
for(idx=World;idx!=NULL;idx=idx->next)
{
if
((idx->ID & ID_Bug)!=0) {
savefile
<< *(Bug *)idx;
}
}
savefile.close();
logfile
<< "Saved file " << filename << endl;
}
void LoadWorld(char *filename) {
//Loads
up bugs into the world
Things
*idx;
int
count;
count=0;
ifstream
loadfile(filename);
loadfile
>> count;
while(count>0)
{
idx=new
Bug;
loadfile
>> *(Bug *)idx;
idx->next=World;
World=idx;
count--;
}
loadfile.close();
logfile
<< "Loaded file " << filename << endl;
}
Paper Project with appendix
max 10
Hypothesis
Issues
Motivation
Architecture
Sensors/motors
Environment/physics
Algorithms
Evaluation/experiment
Status-works/doesn’t
No-related work
Appendix any length
Documented code
Annotated runs
Datafiles
4532-A
dyer mail slot
|
|
||
|
Home | About Me | Text Depository | Future Enhancements | Guest Book | Links
All Rights Reserved. |